| Autor |
Nachricht |
mzenzes
Anmeldungsdatum: 11.10.2006
Beiträge: 8
|
 mzenzes Verfasst am: 17. Dez 2007 20:50 Titel: Fehlerrechnung, totales Differential, Polar/Azimuthwinkel mzenzes Verfasst am: 17. Dez 2007 20:50 Titel: Fehlerrechnung, totales Differential, Polar/Azimuthwinkel |
 |
|
Hallo Leute.
Hänge gerade an einem Projekt, bei dem ich über einen 3-Achsen Erdbeschleunigungsmesser den aktuellen Azimuth(Dreh) und Polar(Kipp)winkel der Messplatine ermitteln will. Der Sensor gibt die aktuelle Beschleunigung (inklusive Erdbeschleunigung) für die drei Achsen x (vor/zurück), y (links/rechts) und z (hoch/runter) aus. Wenn sich der Sensor in Ruhe befindet, wird nur die Erdbeschleunigung gemessen.
Da die Messung natürlich Fehlerbehaftet ist, muss ich wissen, in welchem Rahmen ich den Ergebnissen trauen kann. Meine Überlegung:
- Betrag der aktuellen Beschleunigung ist normiert 1, es wird nur die aktuelle Erdbeschleunigung auf drei Achsen verteilt gemessen.
- Jede Achse steht für einen einzelnen Wert eines dreidimensionalen Vektors
- Mittels Kugelkoordinaten kann man daraus die entsprechenden Winkel ableiten.
- Um den gesamten Fehler auszurechnen (Fehlerfortplanzung), bilde ich jeweils die Ableitung zu jeder der drei Variablen, und multipliziere diese Ableitung mit dem Messfehler: 
Für den Azimuthwinkel Phi:
ergibt sich
=\frac{\mp y (y-x)}{(y^2+x^2)\sqrt{-(\sqrt{y^2+x^2}+x)(x-\sqrt{x^2+y^2})}}\cdot\Delta x \cdot \Delta y)
Wobei ich die Messfehler auf allen Achsen zur Vereinfachung gleich annehme.
Nun die erste Frage: Kann ich den Messfehler als relativen Fehler einsezten? Also sozusagen in %?
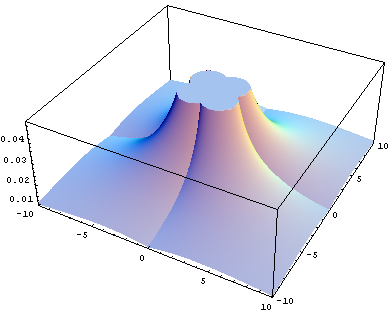
Habe mal den Betrag der oben beschriebenen Funktion mit 0.4% für den relativen Messfehler plotten lassen:
 http://mega2000.de/~mzenzes/flobby/Azimuthwinkel_3D.png http://mega2000.de/~mzenzes/flobby/Azimuthwinkel_3D.png
Sieht doch ganze nett aus. Für x/y gegen Null (also die komplette Erdbeschleunigung wirkt in der z-Achse) lässt sich nicht mehr genau sagen, in welche Richtung ich gerade schaue. Der Fehler steigt.
Die nächste Frage: Ist das Ergebniss nun der relative Fehler? Also habe ich vereinfacht gesagt halbwegs akzeptable Ergebnisse (nur wenige % rel. Fehler) für den Azimuthwinkel / "Drehwinkel", wenn x bzw y mehr als 0.15 vom Vollausschlag haben?
Für den Polarwinkel theta:

nehme ich erst eine Vereinfachung vor, und zwar ist der Betrag meines Vektors eins:  womit sich ergibt das womit sich ergibt das  ist. ist.
Meine nächste Frage: Wie kann ich hier einbauen, das der Betrag meiner Beschleunigung nun nicht immer 1 ist? Also eine weitere Fehlervariable einfügen?
Es ergibt sich dann:
=\frac{1}{\sqrt{1-z^2}}\cdot\Delta z)
Habe auch den rotz mal plotten lassen, mit 0.4% Messfehler, und z von -0.99 bis 0.99.
http://mega2000.de/~mzenzes/flobby/Polarwinkel.png
Wobei ich diesen Graphen nicht selbst deuten kann. Hier steckt wohl noch ein Fehler. Der Polar- bzw "Neigungswinkel" ist erst bei einer gewissen Schrägage eindeutig zu messen? Ja aber wenn x und y null sind, ist meine Schräglage doch Sonnenklar, nämlich Null/180°. Warum geht der relative Fehler gegen unendlich? Ich hätte eher einen relativ flachen Verlauf um den einfachen relativen Fehler erwartet, keine solchen Extremstellen.
Ich danke der Hund liegt hier in meiner Vereinfachung begraben. Aber mir fällt nichts anderes ein, um von den vielen Variablen wegzukommen. Außerdem scheint das so genial simpel...
Zum nachvollziehen hier das ganze nochmal als Octave-script
Jo, das wars dann erstmal von meiner seite. Sicherlich keine alltägliche Frage, aber sonst wärs ja auch langweilig ;-). Vielleicht fühlt sich ja jemand herausgefordert sich da mal einzudenken. Auf jedenfall schonmal Danke an alle, die bis hier gelesen haben!
mit besten Grüßen
Martin
|
|
 |
magneto42
Anmeldungsdatum: 24.06.2007
Beiträge: 854
|
|
|
mzenzes
Anmeldungsdatum: 11.10.2006
Beiträge: 8
|
| mzenzes Verfasst am: 18. Dez 2007 16:05 Titel: vorläufige Antwort - Azimuthwinkel |
|
|
Hallo
Erstmal danke für die Antwort - mein Prof konnte mir heut morgen nicht so wirklich weiterhelfen ;-) naja, zwischen Tür und Angel auch schwer...
Ok, dann...
1. Ja, die Betragsstriche fehlen, hast recht. Im Nachhinein habe ich zwar den Betrag meiner Ergebnisfunktion geplottet, aber das ist natürlich kokoloris.
2. Natürlich muss es heissen  bzw bzw  wenn ich davon ausgehe das auf beiden Achsen der gleiche Messfehler entsteht. 2:0 wenn ich davon ausgehe das auf beiden Achsen der gleiche Messfehler entsteht. 2:0
3. Dein Plot sieht besser aus... 3:0
Wie hast du die undefiniertheit bei y=0 behandelt?
Du sagst absoluter Fehler. Welche Einheit muss  dann haben? Was ist das dann für eine Einheit der z-Achse im Plot? Etwa Grad? dann haben? Was ist das dann für eine Einheit der z-Achse im Plot? Etwa Grad?
Deine x/y Achse ist bis ±10 skaliert, welche Einheit ist das? In meinem Fall wäre das dann in m/s² (Erdbeschleunigung)?
Gut, hier mein neues Ergebniss (mit  ): ):
http://mega2000.de/~mzenzes/flobby/Azimuthwinkel_3D_2.png
4. Ja, das stimmt, die drei Achsen hängen nicht voneinander ab. Aber wie soll ich das visualisieren, wenn ich drei Unbekannte hab?
Andersherum gehe ich ja schon davon aus, das meine Messwerte halbwegs auf einer Kugel liegen. Diese Unsicherheit will ich mit einbauen - Falls sich die Messplatine ein wenig bewegt (der Betrag des Vektos also nicht genau 1 ist), wieviel darf sie sich bewegen, damit das Ergebniss noch korrekt ist?
|
|
|
magneto42
Anmeldungsdatum: 24.06.2007
Beiträge: 854
|
| magneto42 Verfasst am: 18. Dez 2007 20:52 Titel: |
|
|
| mzenzes hat Folgendes geschrieben: | | Du sagst absoluter Fehler. Welche Einheit muss dann haben? Was ist das dann für eine Einheit der z-Achse im Plot? Etwa Grad? |
Ich habe mich an Deine Notation gehalten und sehe x, y, z als Beschleunigung in Richtung der Achsen an. Damit fallen auch die absoluten Fehler  , ,  , ,  in die Kategorie Beschleunigung mit der entsprechenden Einheit. Die dargestellte Funktion in die Kategorie Beschleunigung mit der entsprechenden Einheit. Die dargestellte Funktion ) ist der zum Azimutwinkel ist der zum Azimutwinkel  gehörige absolute Fehler gehörige absolute Fehler  und ist hier im Bogenmaß. und ist hier im Bogenmaß.
| mzenzes hat Folgendes geschrieben: | | Andersherum gehe ich ja schon davon aus, das meine Messwerte halbwegs auf einer Kugel liegen |
Gut, das hatte ich mißverstanden (falsch gelesen). Dann war die Rechnung zum Polarwinkel in Ordnung.
| mzenzes hat Folgendes geschrieben: | | Falls sich die Messplatine ein wenig bewegt (der Betrag des Vektos also nicht genau 1 ist), wieviel darf sie sich bewegen, damit das Ergebniss noch korrekt ist? |
Eine gleichförmige Bewegung erzeugt keinen Meßfehler. Schwankungen und Vibrationen sind aber sicherlich ernst zu nehmen. Wenn sie statistisch verteilt sind muß man das in , , einbeziehen.
|
|
|
mzenzes
Anmeldungsdatum: 11.10.2006
Beiträge: 8
|
| mzenzes Verfasst am: 19. Dez 2007 23:36 Titel: die nächste Antwort |
|
|
Hallo magneto42!
Ok, das mit den Einheiten ist dann klar. Macht auch Sinn, wenn man sich einfach die Si Einheit ausrechnet - in desem Fall kürzen sich in dem Term nämlich alle weg, wenn der Fehler in m/s² angegeben wird. Gut, das ist dann Bogenmaß, weils halt so ist ;-)
Wen es interessiert, hab das ganze nochmal ordentlich aufbereitet, für meinen speziellen Fall:
http://mega2000.de/~mzenzes/flobby/Azimuthwinkel_3D_3.png
Octave Script
Gut, du sagst das die Berechnung des Fehlers des Polarwinkels in Ordnung war. Aber mir geht das nicht in den Kopf, wieso ist die Berechnung so ungenau, wenn der Winkel klein (also z groß) ist? Weil das "Rauschen" auf den beiden anderen Achsen nicht mehr von der Nulllage unterschieden werden kann?
http://mega2000.de/~mzenzes/flobby/Polarwinkel2.png
Octave Script
Zu dem Punkt mit dem von 1 verschiedenen Betrag der Länge des Vektors:
In meinem speziellen Fall wird die Messplatine auf einem Quadrokopter montiert sein, und in den allerwenigsten Momenten wirklich nur die Erdbeschleunigung messen. Deswegen auch die Überlegung diese Unsicherheit des Betrages einzubauen. Aber letztendlich kann ich das ja auch über  einfliessen lassen. einfliessen lassen.
Ich wollte eigentlich nur wissen, in wieweit es sich überhaupt lohnt, die Sensoren auf diese Art auszuwerten. Wann ich sie einbeziehen kann (Stichwort Kalman Filter).
Mein Fazit: Eigentlich schlecht geeignet, da der Fehler doch erschrecklich hoch ist, und in meiner Anwendung selten so große Schräglagen auftauchen. Entweder die Genauigkeit stark verbessern (kaum möglich) oder einfach einen 3D-Kompass einbauen...
Gedankenexperiment: Würde es vielleicht etwas bringen, die Platine (den Sensor) einfach schräg zu montieren? So das im Normalfall (Quadokopter schwebt) schon ein Ausschlag (durch die Erdbeschleunigung) in alle drei Richtungen vorhanden ist? Die Grundauslenkung lässt sich für die anderen Anwednungen (Wegintegral) ja kompensieren...
...mit besten Grüßen
Martin
|
|
|
magneto42
Anmeldungsdatum: 24.06.2007
Beiträge: 854
|
| magneto42 Verfasst am: 20. Dez 2007 12:29 Titel: |
|
|
Hallo mzenzes.
Ich möchte Dir gerne einen anderen Vorschlag für den Fehler von Azimut- und Polarwinkel unterbreiten. Diesmal soll nicht eine Abschätzung des Maximalfehlers betrachtet werden, sondern die Fehlerfortpflanzung. Dies hat den Vorteil, daß sich das Endergebnis sehr vereinfacht. Desweiteren möchte ich von den unanschaulichen Größenbezeichnugen weg hin zu den üblichen. Es seien also

die gemessenen Beschleunigungen auf den Achsen. Dann soll der Fehler für jede Achse gleich sein:
 = \sigma\left({a_y}\right) = \sigma\left({a_z}\right) = \sigma)
Die Gesamtbeschleunigung ist

Dann ergibt sich für den Fehler der Gesamtbeschleunigung
 &=& \sqrt{ \left( \frac{\partial a}{\partial a_x} \right)^2 \, {\sigma \left( a_x \right)}^2 + \left( \frac{\partial a}{\partial a_y} \right)^2 \, {\sigma \left( a_y \right)}^2 + \left( \frac{\partial a}{\partial a_z} \right)^2 \, {\sigma \left( a_z \right)}^2 } \\ &=& \sqrt{ \left( \frac{a_x}{a} \right)^2 \, \sigma^2 + \left( \frac{a_y}{a} \right)^2 \, \sigma^2 + \left( \frac{a_z}{a} \right)^2 \, \sigma^2 } \\ &=& \sigma)
Für die Bestimmung des Polalwinkels ist die Projetion des Beschleunigung auf die x/y-Ebene von Nutzen:

Auch hier ergibt sich aus der Fehlerfortpflanzung.
 = \sigma)
Der Polarwinkel bestimmt sich nach
)
Der Fehler des Polarwinkel bestimmt sich dann aus
 &=& \sqrt{ \left( \frac{\partial \theta}{\partial a_r} \right)^2 \, {\sigma \left( a_r \right)}^2 + \left( \frac{\partial \theta}{\partial a_z} \right)^2 \, {\sigma \left( a_z \right)}^2} \\ &=& \sqrt{ \left( \frac{a_z}{{a_z}^2 + {a_r}^2} \right)^2 \, \sigma^2 + \left( \frac{a_r}{{a_z}^2 + {a_r}^2} \right)^2 \, \sigma^2 } \\ &=& \frac{1}{a} \cdot \sigma)
Hiermit tritt das Ausufern des Polarwinkelfehlers nicht mehr auf. Im Gegenteil, je größer die Beschleunigung, desto besser läßt sich der Winkel angeben.
Analoges läßt sich auch für den Azimutwinkel veranstalten:
)
 &=& \sqrt{ \left( \frac{\partial \varphi}{\partial a_x} \right)^2 \, {\sigma \left( a_x \right)}^2 + \left( \frac{\partial \varphi}{\partial a_y} \right)^2 \, {\sigma \left( a_y \right)}^2} \\ &=& \sqrt{ \left( \frac{a_y}{{a_x}^2 + {a_y}^2} \right)^2 \, \sigma^2 + \left( \frac{a_x}{{a_x}^2 + {a_y}^2} \right)^2 \, \sigma^2 } \\ &=& \frac{1}{a_r} \cdot \sigma)
Die Werte und Fehler von Azimut- und Polarwinkel sind hier selbstverständlich im Bogenmaß zu verstehen.
Vielleicht kannst Du diese Gedankengänge für etwas verwenden.
|
|
|
mzenzes
Anmeldungsdatum: 11.10.2006
Beiträge: 8
|
| mzenzes Verfasst am: 21. Dez 2007 17:01 Titel: Polarwinkelproblem gelöst? |
|
|
Hallo magneto42
Habe mir über deinen Ansatz den Kopf zerbrochen. Ich kann soweit alles nachvollziehen, einen Ansatz dieser Art hatte ich ganz zu Beginn meiner Überlegungen auch.
Aber ich kann mir das im wirklichen Modell nicht erklären:
Wenn meine Platine waagerecht liegt, dann gilt zwar rein mathemtatisch:  und und 
Aber meine realen Messwerte lauten nunmal  und und 
Die real gemessene, aber nicht vorhandene Abweichung (von Null) ist bei waagerchter Lage sehr viel dramatischer als bei 45° Schräglage zb. Folglich ist mein berechneter Winkel in diesem Fall sehr viel ungenauer als wenn die drei gemessenen Werte jeweils von 0 verschieden sind.
Wie das jetzt aber mit der Aussage zur Standardabweichung zusammenkommt?
Anyway. Habe meine Berechnung zum Polarwinkelfehler auch nocheinmal überarbeitet. Ich habe den Fehler gemacht, und die Gleichung  vor der Ableitung eingesetzt. Damit verliere ich den Zusammenhang mit vor der Ableitung eingesetzt. Damit verliere ich den Zusammenhang mit  . .
Also mache ich folgendes:
Für meinen Polarwinkel gilt:
Also gilt für den Fehlerverlauf:
 \cdot 3 \cdot \Delta mess)
Also:
\right)\cdot \sqrt{x^2+y^2}+\left|z\right|}{x^2+y^2+z^2}\cdot3\cdot\Delta mess)
Nun setzte ich den Zusammenhang  ein: ein:
\right)\cdot\sqrt{a^2-z^2}+\left|z\right|}{a^2}\cdot3\cdot\Delta mess)
In meinem speziellen Fall ist:

und:

Somit ergibt sich folgender Verlauf:
http://mega2000.de/~mzenzes/flobby/Polarwinkel3.png
Octave-script
Dieser Verlauf stellt mich schon ganz gut zufrieden. Der Fehler geht gegen Null, wenn z~147digits ist, was einem Winkel von 45° entspricht. In diesem Fall wird die Ungenauigkeit aller drei Achsen am Gleichmäßigsten verteilt (Der relative Fehler jeder Achse ist am kleinsten).
Der Fehler hat seine Maxima bei 0, -1 und 1. Also an den Stellen wo das 4digit-Rauschen ein relativ großer Anteil am gemessenen Wert wird (bei z=0 auf der z-Achse, bei z=±1 auf der x und y Achse.)
Das erfreuliche an diesem Graphen ist, das ich in jedem Fall, egal wie meine Ausrichtung im Raum ist, den Polarwinkel mindestens auf 3° genau bestimmen kann!
Um nochmal auf deinen Ansatz zurückzukommen. Ich habe nun einen Verlauf herleiten können, in welchen Bereichen von x,y,z ich den Winkel bei einem gegebenen Rauschen sicher bestimmen kann.
Aber was ist dann die Standardabweichung, hierrauf bezogen? Schliesslich ist die, nach meinem Verständniss auch von der jeweiligen Messwerten abhängig, oder? Ich meinen sie wird schwanken, jeh nach dem in welcher Raumlage ich mich befinde..?
Ganz schönes herumdoktorn an diesem Problem. Eigentlich nicht mehr als try'n error. Zumal ich eigentlich immernoch nicht fertig bin. Schliesslich fehlt mir noch der Zusammenhang mit der Anhängigkeit vom Betrag. Aber ich glaube das führt langsam zu weit. Ich weis immerhin, das der Polarwinkel ganz ordentlich bestimmt werden kann!
|
|
|
magneto42
Anmeldungsdatum: 24.06.2007
Beiträge: 854
|
| magneto42 Verfasst am: 22. Dez 2007 18:45 Titel: |
|
|
Hallo.
Ein wenig habe ich mich mit der Problematik noch beschäftigt. Die Unzufriedenheit ob der Ungenauigkeit des Azimutwinkels ist verständlich, wenn man hauptsächlich Meßwerte senkrecht zur xy-Ebene erwartet. Dies ergibt sich auch aus dem Ansatz der Fehlerfortpflanzung
 = \frac{\sigma}{a_r})
Da  die Beschleunigung innerhalb der xy-Ebene ist und ständig nahe null ist, kann der Azimutwinkel nur sehr unbestimmt sein. Für den Polarwinkel die Beschleunigung innerhalb der xy-Ebene ist und ständig nahe null ist, kann der Azimutwinkel nur sehr unbestimmt sein. Für den Polarwinkel  ist ein derartiges Verhalten zwar möglich, aber hier nicht nu erwarten. ist ein derartiges Verhalten zwar möglich, aber hier nicht nu erwarten.
Ich möchte deshalb einen Vorschlag zu Abhilfe unterbreiten. Die Platine schief einzubauen ist zwar möglich, aber überhaupt nicht notwendig. Es ist nämlich viel einfacher, wenn man das Koordinatensystem dreht  . Der Polarwinkel wird von der z-Achse aus gemessen, die deshalb eine gewisse Vorzugsrichtung darstellt. Es spricht meines Erachtens viel dafür dazu die "Vorwärtsrichtung" zu nehmen. Die y-Achse kann in Richtung Erdboden zeigen und nimmt damit bei waagerechter Lage die Ergbeschleunigung auf. Die x-Achse zeigt dann für ein rechtsdrehendes Koordinatensystem nach rechts. . Der Polarwinkel wird von der z-Achse aus gemessen, die deshalb eine gewisse Vorzugsrichtung darstellt. Es spricht meines Erachtens viel dafür dazu die "Vorwärtsrichtung" zu nehmen. Die y-Achse kann in Richtung Erdboden zeigen und nimmt damit bei waagerechter Lage die Ergbeschleunigung auf. Die x-Achse zeigt dann für ein rechtsdrehendes Koordinatensystem nach rechts.
Noch ein Wort zu dem, zu was die Messung überhaupt führt. Das Koordinatensystem ist fest zur Platine. Die drei gemessenen Beschleunigungswerte ergeben nun die Gesamtbeschleunigung a innerhalb dieses Koordinatensystems. Die Winkel und geben immer nur die Lage des Fluggerätes bezülich der momentanen Beschleunigungsrichtung an. Die Sensoren können nämlich nicht zwischen der Schwerebeschleunigung und der Bewegungsbeschleunigung unterscheiden. Nur wenn sich das Fluggerät im Zustand der Ruhe oder gleichförmigen Bewegung befindet, läßt sich auch eine konkrete Aussage über die Lage im Raum machen, weil in diesem Fall nur die Erdbeschleunigung auftritt.
Nun zur Bewertung Deiner Rechnung für den Polarwinkel. Ich bin da verwirrt bis gar nicht einverstanden, was dort steht.
| mzenzes hat Folgendes geschrieben: | Also gilt für den Fehlerverlauf:
|
Warum hast Du einen Faktor 3 dort eingefügt? Ist das eine Sicherheitsmarge? Durch das Ausklammern von  entsteht er jedenfalls nicht. entsteht er jedenfalls nicht.
| mzenzes hat Folgendes geschrieben: | |
Ein Fehlerwert kann immer nur positiv sein (das mit den Betragstrichen hatten wir doch schon), deshalb ist eine Signumfunktion fehl am Platze. Aber auch mit dem Rest bin ich nicht einverstanden. Auf meinem Rechenzettel habe ich folgendes erhalten (bitte selbst nachrechnen):
 \cdot \sqrt{{a_x}^2 + {a_y}^2}} \cdot \Delta_{Mess})
Abschließend füge ich noch ein paar Graphiken an.
1. Azimutwinkel in Grad; die Achsen sind  und und  in Digit-Einheiten. in Digit-Einheiten.
2. Polarwinkel in Grad; die Achsen sind und  in Digit-Einheiten. in Digit-Einheiten.
3. Fehler in Grad; der Fehler der kartesischen Achsen ist 2 in Digit-Einheiten.
4. Fehler ) in Grad. in Grad.
5. Fehler  in Grad. in Grad.
6. Fehler ) in Grad. in Grad.
Viel Spaß damit.
Edit:
Graphiken zusammengefaßt.
| Beschreibung: |
|

Download |
| Dateiname: |
Phi-Theta.png |
| Dateigröße: |
27.07 KB |
| Heruntergeladen: |
4189 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
DeltaPhi-SigmaPhi.png |
| Dateigröße: |
46.63 KB |
| Heruntergeladen: |
4132 mal |
| Beschreibung: |
|
Download |
| Dateiname: |
DeltaTheta-SigmaTheta.png |
| Dateigröße: |
40.84 KB |
| Heruntergeladen: |
4132 mal |
|
|
|
|
|