| Autor |
Nachricht |
VeryApe

Anmeldungsdatum: 10.02.2008
Beiträge: 3320
|
 VeryApe Verfasst am: 29. Apr 2024 22:36 Titel: Konzept starrer Körper - reibungsfrei VeryApe Verfasst am: 29. Apr 2024 22:36 Titel: Konzept starrer Körper - reibungsfrei |
 |
|
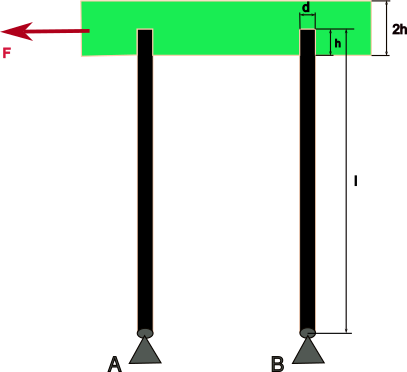
Zwei zylindrische Stäbe sind drehbar gelagert und in einen Quader der Breite b, Länge a und Höhe 2h mit Spielpassung eingeführt.
In der Aufnahme Können keine Kräfte nach unten übertragen werden. Reibungsfrei.
Konzept der Starrheit in Kombination mit reibungsfrei, müsste meiner Ansicht dazu führen, dass die ganze Anordnung sich im Gleichgewicht befinden muss.
Es ist aber mechanisch kein Gleichgewicht möglich Widerspruch mit Starrheit?
Was wird real passieren - die Stäbe verkanten und B wird ausgehoben oder bleib stecken.
Aber irgendwie ist das Konzept der Starrheit mit reibungsfrei hier im Widerspruch mit Mechanik Kraft und Drehmoment , hm?
| Beschreibung: |
|
| Dateigröße: |
9.13 KB |
| Angeschaut: |
24256 mal |
|
_________________
WAS IST LOS IN EUROPA? https://www.youtube.com/watch?v=a9mduhSSC5w |
|
 |
gdfghfggjh
Gast
|
| gdfghfggjh Verfasst am: 30. Apr 2024 01:48 Titel: |
|
|
|
ist das eine seiten oder eine draufsicht
|
|
|
VeryApe
Anmeldungsdatum: 10.02.2008
Beiträge: 3320
|
|
|
VeryApe
Anmeldungsdatum: 10.02.2008
Beiträge: 3320
|
| VeryApe Verfasst am: 02. Mai 2024 21:26 Titel: |
|
|
Scheint keinen zu stören, mich quält das schon länger. So ein starrer Körper könnte sich theoretisch mit unendlichen Kräften gegen Formänderung bzw Durchdringung wehren. Auf der einen Seite wenn kein Gleichgewicht möglich wäre, dann müsste sich das Ganze bewegen, dann würden die Stangen oder der Quader aber nicht ihre Form behalten, dann müssten sie sich mit unendlichen Kräften gegen die Bewegung wehren, bringt aber wieder nichts weil ich kein Gleichgewicht zusammenbringe, das gibts ja nicht, egal was ich mache irgendwas bewegt sich immer entweder Stangen oder Quader, Ich hätte jetzt fix gesagt mit unendlichen Kräften könnte ich jede Bewegung verhindern, scheint aber nicht der Fall zu sein.
_________________
WAS IST LOS IN EUROPA? https://www.youtube.com/watch?v=a9mduhSSC5w |
|
|
bronkowitz
Anmeldungsdatum: 15.09.2019
Beiträge: 60
|
| bronkowitz Verfasst am: 03. Mai 2024 10:29 Titel: |
|
|
|
ich denke es ist momentan beweglich - je nach Größe des Spiels - und dann wird es verkanten und stehenbleiben, sobald die Passungen anfangen Moment zu übertragen
|
|
|
VeryApe
Anmeldungsdatum: 10.02.2008
Beiträge: 3320
|
|
|
gdfghfggjh
Gast
|
| gdfghfggjh Verfasst am: 03. Mai 2024 23:33 Titel: |
|
|
|
Mathematik beschreibt die Realität eben nur unzureichend, face it.
|
|
|
bronkowitz
Anmeldungsdatum: 15.09.2019
Beiträge: 60
|
| bronkowitz Verfasst am: 04. Mai 2024 08:49 Titel: |
|
|
ja, ok - ideal reibungsfrei würde sich der Körper wohl herausheben. Dass man sich das nicht vorstellen kann liegt halt daran, dass in der Realität immer Reibung vorhanden ist. Und Verformung.
Und dass eine Konfiguration ohne Berücksichtigung von Verformungen nicht berechenbar ist, ist ja auch nicht ungewöhnlich. Bei statischer Überbestimmtheit ist man gezwungen Verformungen heranzuziehen, auch wenn einen die vielleicht gar nicht interessieren.
Ich denke übrigens, dass du in deinem Bild noch die senkrechte Kraft oben am Stab mit einbeziehen musst. Da liegt der Körper ja zumindest am Anfang auf.
Gibt es da ein reales Problem dahinter, oder interessiert es dich nur prinzipiell?
Falls du es wirklich berechnen musst, würde ich es so angehen wie in meiner Skizze. Mit Kontakt über (gedachte) reibungsfreie Rollen. Wegen der Überbestimmtheit würde ich an jeder Auflage eine (sehr hohe) Kontaktsteifigkeit als Feder einbauen. So bekommt man die Kräfte heraus. Die Kontaktkräfte können an jeder Kante jeweils sowieso nur an einem Punkt (also einer Rolle) auftreten. Man muss zweimal rechnen, um zunächst die Kontakte auszusortieren, die im Zugbereich sind - also in Wirklichkeit abheben. Das ist wichtig!
Wenn sich auf diese Weise kein Gleichgewicht ergibt, bewegt sich der Körper tatsächlich und man muss Trägheitskraft und -moment mit ansetzen, wenn man die Bewegung tatsächlich berechnen will.
| Beschreibung: |
|

Download |
| Dateiname: |
Modell.PNG |
| Dateigröße: |
17.13 KB |
| Heruntergeladen: |
144 mal |
|
|
|
Celestina_Shepherd
Gast
|
| Celestina_Shepherd Verfasst am: 06. Mai 2024 11:51 Titel: |
|
|
| VeryApe hat Folgendes geschrieben: | | Aufriss, Seitenansicht (h = Höhe), aber ginge auch als Grundriss... |
Ich denke, es ist schon wichtig zu wissen, ob es sich um eine Seitenansicht oder um einen Grundriss handelt. Bei einer Seitenansicht kommt auf jeden Fall die Gewichtkraft Fg des Quaders zum Tragen. Und wenn das der Fall ist, dann wäre zuerst zu betrachten, ob das Problem in den Bereich der Statik oder Dynamik gehört, nachdem sich die Stangen um einen kleinen Winkel phi gedreht haben und das "theoretische Verkanten" einsetzt.
Ich würde daher vorschlagen, erst einmal zu klären, ob es einer Mindestkraft für F bedarf, um in die Dynamik zu gelangen? In diesem Fall müsste zumindest die horizontal geleistete Arbeit (F*dx) so groß sein wie die Änderung der potenziellen Energie (Fg*dz).
Was wäre z.B., wenn F < Fg/tan(phi) ist?
Grüße von
Celestina
|
|
|
VeryApe
Anmeldungsdatum: 10.02.2008
Beiträge: 3320
|
| VeryApe Verfasst am: 11. Mai 2024 19:14 Titel: |
|
|
@ Celestina_Shepherd F*l > m*g*sa
sa... Normalabstand des Massenmittelpunktes auf A
Natürlich spielt auch die Gewichtskraft eine Rolle, aber nicht für das um was es hier eigentlich geht. Geh einfach davon aus das F*l größer dem Drehmoment der Schwerkraft bezüglich A ist.
Und bei einer Draufsicht stellt sich diese Frage nicht.
| Zitat: |
Gibt es da ein reales Problem dahinter, oder interessiert es dich nur prinzipiell?
|
Ja und nein. https://img-new.cgtrader.com/items/2554896/9fa801627a/staircase-3d-model-ma.jpg - stell dir vor die Seitenteile wären gegenüber der Horizontalen Achse drehbar (somit versenkbar und die Treppen (einzeln über Klavierbänder befestigt, lassen sich komplett ebnen) werden oben aufgesetzt, dann bist du in der Skizze oben. Das Ganze würde ich so aber nicht bauen, habs anders gebaut. Aber theoretisch darüber nachgedacht.
_________________
WAS IST LOS IN EUROPA? https://www.youtube.com/watch?v=a9mduhSSC5w |
|
|
|


