| Autor |
Nachricht |
kommando_pimperlepim

Anmeldungsdatum: 15.11.2004
Beiträge: 133
|
 kommando_pimperlepim Verfasst am: 16. Jun 2006 10:18 Titel: Trägheitstensor: kugelförmiger Käse mit zwei Käselöchern kommando_pimperlepim Verfasst am: 16. Jun 2006 10:18 Titel: Trägheitstensor: kugelförmiger Käse mit zwei Käselöchern |
 |
|
Hallo.
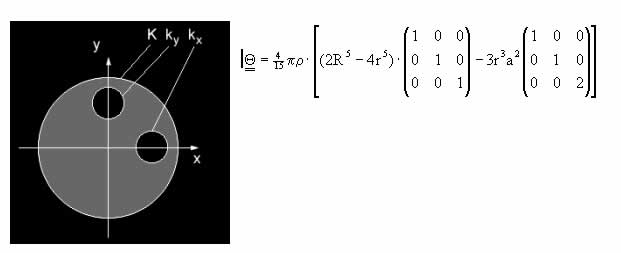
Ich habe versucht den Trägheitstensor einer Kugel, aus der 2 kleine sich nicht überlappende Kugeln ausgeschnitten sind, zu berechnen. Der Mittelpunktsabstand zwischen großer und kleiner Kugel sei a.
(Abbildung und Ergebnis siehe Anhang)
Der berechnete Trägheitstensor bezieht sich auf den Ursprung der Abbildung.
? Mich würde interessieren, ob das Ergebnis stimmt.
Außerdem soll laut Aufgabe der Schwerpunktsträgheitstensor berechnet werden. Das Problem ist aber, dass wegen der Ausschnitte, der Schwerpunkt nach unten links verschoben ist.
? Weiß jemand wie man diesen Schwerpunkt berechnet und ? ob das wirklich so gemeint ist (immerhin ist das Ergebnis so schön diagonal).
| Beschreibung: |
|
| Dateigröße: |
10.67 KB |
| Angeschaut: |
2817 mal |
|
|
|
 |
kommando_pimperlepim
Anmeldungsdatum: 15.11.2004
Beiträge: 133
|
| kommando_pimperlepim Verfasst am: 16. Jun 2006 10:22 Titel: Bemerkung |
|
|
Achso:
R... Radius große Kugel
r... Radius kleine Kugel
a... Mittelpunktsabstand zwischen kleiner und großer Kugel
Und die Masse sei homogen verteilt.
|
|
|
as_string
Moderator

Anmeldungsdatum: 09.12.2005
Beiträge: 5797
Wohnort: Heidelberg
|
| as_string Verfasst am: 16. Jun 2006 22:48 Titel: |
|
|
Ich habe mal kurz Deine Lösung nach gerechnet... Bist Du Dir mit der 3 vor der 2. Matrix sicher? Ich hätte da eine 5 stehen, weil Du ja 4/15 ausgeklammert hast und die 15 = 3*5 ist und die 5 ja vom Kugelträgheitsmoment kommt und die 3 vom Kugelvolumen in der Masse. Die Masse hast Du ja aber beim Steiner'schen Satz noch drin (also die drittel) aber nicht mehr die fünftel, weil Du ja in den Termen nichts von einer Kugel drin hast...
Uiuiui, ich hoffe, Du hast verstanden was ich meine... Manchmal ziemlich schwer jemandem etwas zu erklären, wenn man nicht gemeinsam auf eine Tafel oder ein Blatt Papier schauen kann!
Anstonsten bin bin ich voll einverstanden. Ich denke auch, dass Du wirklich den Tensor relativ zum "richtigen" Schwerpunkt machen mußt... 
Da brauchst Du halt dann noch ein paar mal den Steiner'schen Satz, tut mir leid...
Gruß
Marco
|
|
|
kommando_pimperlepim
Anmeldungsdatum: 15.11.2004
Beiträge: 133
|
| kommando_pimperlepim Verfasst am: 19. Jun 2006 07:48 Titel: |
|
|
as_string:
Du müsstest Recht haben mit der Ziffer, vielen Dank für die Mühe.
? Zum Übergang zum Schwepunkt bräuchte ich doch nur noch einmal Steiner .
Seien
M... Masse der großen Kugel, wenn sie voll wäre
m... Masse einer kleinen Kugel, wenn sie aus Materie wäre
R... Ortsvektor der großen Kugel (Mittelpunkt)
r1/2... Ortsvektoren der kleinen Kugeln (Mittelpunkte)
Dann währe der Schwerpunkt S doch
? S = M*R - mr1 - mr2
wobei R=Nullvektor ist.
? Und dann müsste ich doch den genannten Tensor mit Steiner nur noch einmal bezüglich S formulieren und wäre fertig.
? Kann man Trägheitstensoren und Massenschwerpunkte immer so addieren und subtrahieren oder machst du das anders
|
|
|
as_string
Moderator
Anmeldungsdatum: 09.12.2005
Beiträge: 5797
Wohnort: Heidelberg
|
| as_string Verfasst am: 19. Jun 2006 10:31 Titel: |
|
|
mmh 
Ich habe im Augenblick leider nur etwas wenig Zeit. Ich müßte mir eigentlich erst genauere Gedanken machen, aber was mir gerade zum Thema Trägheitstensor eingefallen ist: Wenn Du die Drehachsen verschiebst, drehen sich dann nicht auch die Hauptträgheitsachsen?
Ich stelle mir das gerade so vor: Der Schwerpunkt muß sich ja irgendwie nach links unten im Winkel von 45° zu den Koordinatenachsen verschoben haben. Rein von der Symmetrie her geht doch dann eine Hauptachse bestimmt durch die Mitte der beiden kleinen Kugeln und durch den bisherigen Ursprung, also 45° schräg von links unten nach rechts oben.
Ich vermute also, dass es doch nicht so einfach sein wir, den Tensor zu transformieren... Wahrscheinlich mußt Du danach noch eine Hauptachsentransformation machen. Oder gleich die ganzen Trägheitsmomente mit den neuen Achsen berechnen...
Was meinst Du?
Gruß
Marco
//Edit: Wenn ich es mir genau überlege, kann eigentlich der Trägheitstensor vom Anfang auch nicht stimmen, weil auch da schon die Hauptachsen anders liegen müssen...
Die Trägheitsmomente in die drei Richtungen Deines Koordinatensystems stimmen, so weit habe ich das nach gerechnet (naja, bis auf die 3 bzw 5 vielleicht). Aber wahrscheinlich bekommst Du noch abseits der Diagonalen irgendwelche Beiträge, oder?
Ich rechne jetzt erstmal aus, wo überhaupt der Schwerpunkt ist. Vielleicht bringt das schon weiter.
|
|
|
as_string
Moderator
Anmeldungsdatum: 09.12.2005
Beiträge: 5797
Wohnort: Heidelberg
|
|
|
kommando_pimperlepim
Anmeldungsdatum: 15.11.2004
Beiträge: 133
|
| kommando_pimperlepim Verfasst am: 20. Jun 2006 07:21 Titel: hmmm... |
|
|
Also ich würde sagen, dass das stimmt, schließlich sollte der Trägheitstensor immernoch Zylindersymmetrie besitzen, d.h. diagonal sein und zwei gleiche Diagonalelemente besitzen. (Die Drehungen um die neuen Achsen x' und y' sind ja nicht unterscheidbar.)
? Ich frage mich nur was du mit "ein paar mal den Steinerschen Satz verwenden" meintest, schließlich ist das doch nur nochmal ein einziger Wechsel des Koordinatensystems.
|
|
|
as_string
Moderator
Anmeldungsdatum: 09.12.2005
Beiträge: 5797
Wohnort: Heidelberg
|
| as_string Verfasst am: 20. Jun 2006 11:50 Titel: |
|
|
Hallo!
Ja, da bin ich noch davon ausgegangen, dass man einfach die neuen Trägheitsmomente zu dem neuen Schwerpunkt ausrechnen müsse. Ich dachte, dass man einfach das Trägheitsmoment um die senkrechte Achse nehmen könne, diese Achse quasi mit dem Steiner'schen Satz nach links verschieben würde und genauso die waagerechte nach unten. Dann hätte man zweimal den Steiner'schen Satz anwenden müssen.
Brauchst Du eigentlich das Trägheitsmoment durch den Koordinatenürsprung überhaupt noch, oder war nur nach dem durch den Schwerpunkt gefragt?
Ich bin mir nicht mehr so ganz in jedem Detail sicher mit dem Trägheitstensor Thema. So weit ich mich erinnern kann müssen die Hauptträgheitsachsen schon alle rechtwinklig aufeinander stehen. Von der Symmetrie her sollten die von mir oben beschriebenen Achsen auch die Hauptträgheitsachsen sein, oder (also quasi das in der Zeichenebene um 45° gedrehte Koordinatensystem mit dem verschobenen Ursprung auf den neuen Schwerpunkt)?
Wenn das die Hauptträgheitsachsen sind, dann sollte doch der Tensor mit diesem neuen Koordinatensystem Diagonalform haben, oder? Also brauchen wir dann nur noch die Trägheitsmomente um diese neuen Achsen und der Tensor wäre schon fertig!
Jetzt ist aber die Frage: Mußt Du den dann wieder in die ursprünglichen x/y-Richtungen zurück transformieren? Ich denke schon, wenn die Aufgabe so gestellt ist. Was meinst Du?
Gruß
Marco
//Edit: Ich habe diese Frage noch gar nicht beantwortet:
| Zitat: | | ? Kann man Trägheitstensoren und Massenschwerpunkte immer so addieren und subtrahieren oder machst du das anders |
Die Frage ist, was Du mit "so addieren" meinst. Ein Trägheitsmoment ist ja über ein Integral definiert. Wenn man Trägheitsmomente bezüglich der selben Achse hat, kann man die deshalb einfach addieren. Wenn die Achsen nur parallel sind, muß man noch mit dem Steiner'schen Satz das ganze übereinander schieben. Im Integral kommt ja r² vor und deshalb muß das r auch bezüglich der selben Achse sein.
Beim Schwerpunkt ist auch toll, dass man Objekte zusammenfassen kann. Wenn ich also den Schwerpunkt von einem Teil ausgerechnet habe, kann ich diesen Teil zusammenfassen, indem ich nur noch eine im Schwerpunkt vereinigte Punktmasse mir vorstelle. Das macht die Berechnung deutlich einfacher. Wenn man jedes mal so ein kompliziertes 3-dimensionales Integral ausrechnen müsste...
Gruß nochmal!
|
|
|
|