| Autor |
Nachricht |
caliebe
Anmeldungsdatum: 25.08.2006
Beiträge: 59
Wohnort: Rastatt
|
 caliebe Verfasst am: 16. Sep 2006 09:50 Titel: Rotation um bewegte Achse caliebe Verfasst am: 16. Sep 2006 09:50 Titel: Rotation um bewegte Achse |
 |
|
Hallihallöchen,
folgende Aufgabe bringt mich um, ich finde nicht den Ansatz:
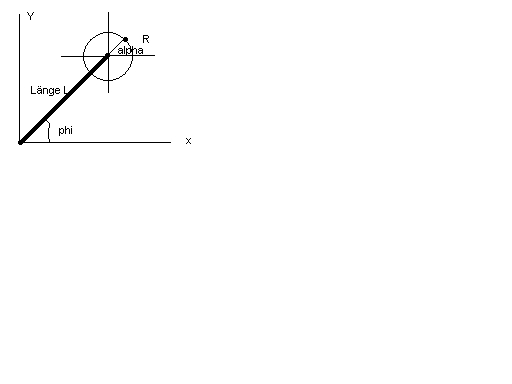
Eine Kreisscheibe (Radius R) ist im Mittelpunkt (A) auf einem Arm der länge L gelagert, der sich mit Winkelgescwindigkeit um eine feste Achse durch 0 dreht. (0= Ursprung kart.Koordinaten in Zeichnung) Die Scheibe dreht sich um eine feste Achse in A mit Winkelgeschwindigkeit um eine feste Achse durch 0 dreht. (0= Ursprung kart.Koordinaten in Zeichnung) Die Scheibe dreht sich um eine feste Achse in A mit Winkelgeschwindigkeit  gegen ein festes Bezugssystem. gegen ein festes Bezugssystem.
Gesucht ist die momentane Geschwindigkeit und Beschleunigung eines Punktes auf dem Kreisumfang.
In der Zeichnung ist Winkel zwischen x-Axhse und Stab  und zwischen Punkt auf Kreis und Achse in x-Richtung und zwischen Punkt auf Kreis und Achse in x-Richtung 
Ich weiß nur, daß es sich hier um Rotation um eine bewegte Achse, wobei diese Bewegte Achse eine Rotation durchlebt. Muß ich nun laut Aufgabe annehmen, daß sich der Punkt auf der Scheibe in entgegengesetzter Richtung dreht?
Welchen Ansatz muß ich nun nehmen? Momentensatz für Massenpunktsysteme?
Wer kann mir helfen?
Anya
|
|
 |
Patrick
Anmeldungsdatum: 05.07.2006
Beiträge: 417
Wohnort: Nieder-Wöllstadt
|
| Patrick Verfasst am: 16. Sep 2006 10:08 Titel: |
|
|
Vielleicht zu gebrauchen:


Für Beschleunigung:


|
|
|
caliebe
Anmeldungsdatum: 25.08.2006
Beiträge: 59
Wohnort: Rastatt
|
| caliebe Verfasst am: 16. Sep 2006 10:18 Titel: |
|
|
Danke, aber wie man Ableitungen bildet, weiß ich auch; Auch daß die erste Ableitung eines Winkels Die Winkelgeschwindigkeit, und die zweite die Winkelbeschleunigung angibt. Ich weiß auch, daß bei der Beschreibung der Kreisbewegung die Umfangsgeschwindigkeit  ist etc., aber wie beschreibe ich nun die Bewegung? ist etc., aber wie beschreibe ich nun die Bewegung?
Polar oder Natürliche Koordinaten?
Wie bekomme ich die Rotation der Scheibe auf die Rotation der bewegten Achse, damit ich meine Umfangssgeschwindigkeit der Scheibe bekomme?
Hilfe!
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 16. Sep 2006 11:20 Titel: |
|
|
Ich habe bisher noch nicht ganz verstanden, wie die Skizze zur Aufgabenstellung aussieht.
* Meinst du mit "Stab" dasselbe wie mit "Arm"?
* Was meinst du mit dem Winkel alpha? Einen Winkel zwischen einem Punkt und einer Geraden kann ich mir nicht vorstellen, welche zwei Geraden schneiden sich im Winkel alpha?
* Kannst du eventuell mal die Skizze einscannen oder mit einem Zeichenprogramm selber malen und hier reinstellen?
-------------------
Ich habe bisher die Vermutung, dass es in dieser Aufgabe um zwei einander überlagerte Drehbewegungen um zwei verschiedene Drehachsen geht. Dann kannst du die Geschwindigkeit und die Beschleunigung des Punktes auf der Kreisscheibe ausrechnen, indem du:
A) Die Bewegung des Punktes in einem Koordinatensystem (X,Y,Z) aufstellst, dessen X-Achse der Stab ist.
B) Eine Transformation zwischen diesem Stab-Koordinatensystem (X,Y,Z) und dem Koordinatensystem (x,y,z) mit der raumfesten x-Achse aufstellst (Das Stabsystem ist ein im Vergleich zu (x,y,z) gedrehtes Koordinatensystem; weil es um die x-Achse rotiert, ist die Richtung dieser Drehung zeitabhängig.)
C) Wenn du diese Transformation aus B) auf die Bewegung aus A) anwendest, dann bekommst du die Bewegung des Punktes in kartesischen Koordinaten im ruhenden Koordinatensystem (x,y,z) und kannst damit Geschwindigkeit und Beschleunigung in Abhängigkeit von der Zeit ausrechnen.
-----------
// edit: Das ist natürliche eine sehr allgemeine Lösungsmethode. Die "funktioniert immer", aber dazu muss man es schaffen, mit Drehmatrizen eine Transformation zwischen zwei kartesischen Koordinatensystemen zu rechnen. Falls das für dich nicht zum Mathe-Standard gehört, kommen konkret auch andere Wege in Frage:
Für beide Kreisbewegungen kannst du getrennt ausrechnen, wie groß die Geschwindigkeit und die Beschleunigung in Abhängigkeit von der Zeit ist. Wenn du es nun mit einer sauberen Skizze schaffst, herauszufinden, wie der Winkel zwischen den Richtungen der beiden Geschwindigkeiten sich mit der Zeit verändert, dann kannst du die Geschwindigkeiten vektoriell addieren und kommst damit auch ohne die Methode von oben (also ohne formale Koordinatentransformation mit Drehmatrix) zum Ziel.
|
|
|
caliebe
Anmeldungsdatum: 25.08.2006
Beiträge: 59
Wohnort: Rastatt
|
| caliebe Verfasst am: 16. Sep 2006 12:20 Titel: |
|
|
here we go,
aber ist das koordinatensystem eine polar oder natürliche nicht einfacher?
Anya
| Beschreibung: |
|
| Dateigröße: |
12.18 KB |
| Angeschaut: |
7297 mal |
|
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 16. Sep 2006 16:25 Titel: |
|
|
Ah, jetzt verstehe ich auch, in welcher Ebene sich die Kreisscheibe dreht!
Ich glaube, diese beiden verschiedenen Drehungen in ein und demselben Koordinatensystem mit Polarkoordinaten zu beschreiben, ist so kompliziert, das es sicher nicht die einfachste Möglichkeit ist. Polarkoordinaten würde ich also nicht empfehlen.
Aber mit der Anordnung laut Skizze ist das vektorielle Addieren der Geschwindigkeitsvektoren der beiden überlagerten Kreisbewegungen ziemlich leicht:
Denn die Geschwindigkeitsvektoren der beiden Kreisbewegungen stehen in jedem Moment senkrecht aufeinander.
Schaffst du es damit schon, die Aufgabe zu knacken?
|
|
|
caliebe
Anmeldungsdatum: 25.08.2006
Beiträge: 59
Wohnort: Rastatt
|
| caliebe Verfasst am: 16. Sep 2006 17:02 Titel: |
|
|
Von der Idee her vielleicht, wenn du damit die Relativbewegungen damit meinst. Praktisch gesehen habe ich davon keinen Plan.
Kannst du mir irgendwie weiterhelfen.
|
|
|
Nikolas
Ehrenmitglied
Anmeldungsdatum: 14.03.2004
Beiträge: 1873
Wohnort: Freiburg im Brsg.
|
| Nikolas Verfasst am: 16. Sep 2006 17:11 Titel: |
|
|
Nimm dir zwei Vektoren in der Ebene: einen vom Origo zum MIttelpunkt der Scheibe. (kartesische Koordinaten). Ich nenn in mal v_1. (wie sieht der aus?)
dann einen zweiten (v_2) vom mittelpunkt der Scheibe zu einem Punkt am Rand. Die Position des Punktes am Rand relativ zum Origo kannst du jetzt einfach erhalten, in dem du v_! und v_2 addierst. Und wenn du zu jedem Zeitpunkt den Ort deines Punktes kennst, kennst du auch seine Geschwindigkeit und Beschleuningung.
_________________
Nikolas, the mod formerly known as Toxman.
Erwarte das Beste und sei auf das Schlimmste vorbereitet. |
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 16. Sep 2006 17:44 Titel: |
|
|
Stimmt, die Vorgehensweise, die Nikolas nennt, führt uns auf die richtige Spur. Mit Origo meint er den Koordinatenursprung O. Mit v_1 und v_2 meint er keine Geschwindigkeitsvektoren, sondern einfach Vektoren, die zwei Punkte im Raum verbinden.
Deine Aufgabe besteht also nun darin, den Vektor  vom Koordinatenursprung O zum Stabende (=Scheibenmittelpunkt) A aufzustellen, dann den kreisenden Vektor vom Koordinatenursprung O zum Stabende (=Scheibenmittelpunkt) A aufzustellen, dann den kreisenden Vektor ) vom Scheibenmittelpunkt A zum Punkt auf dem Kreisumfang aufzustellen, und dann diese beiden Vektoren vektoriell zu addieren: vom Scheibenmittelpunkt A zum Punkt auf dem Kreisumfang aufzustellen, und dann diese beiden Vektoren vektoriell zu addieren:  = \vec P(t)) . .
Damit haben wir die Lage von ) in dem Koordinatensystem, das mit dem Stab um die x-Achse mitrotiert. in dem Koordinatensystem, das mit dem Stab um die x-Achse mitrotiert.
Wenn wir das nun noch ins ruhende, also nicht um die x-Achse mitdrehende Koordinatensystem transformieren, haben wir den zeitabhängigen Ortsvektor, aus dem man durch Ableiten die Geschwindigkeit und die Beschleunigung ausrechnen kann.
------------------------------
Sind dir Drehmatrizen oder Transformationen zwischen relativ zueinander rotierenden Koordinatensystemen bekannt / geläufig; kannst du das also mit dieser Methode machen?
-----------------------------------------------------
(Das, was ich oben vorgeschlagen hatte, nämlich die beiden Bahngeschwindigkeiten der beiden Kreisbewegungungen einfach vektoriell zu addieren, führt hingegen nicht genau zum richtigen Ergebnis. )
|
|
|
caliebe
Anmeldungsdatum: 25.08.2006
Beiträge: 59
Wohnort: Rastatt
|
| caliebe Verfasst am: 16. Sep 2006 20:36 Titel: |
|
|
dein Ansatz scheint plausibel, sprich die Vektoren einfach vektoriell zu addieren, aber wenn es falsch ist.?
Ich quäle mich gerade durch den Stoff der Kinetik der ebenen und räumlichen Bewegung um vielleicht auf einen brauchbaren Ansatz zu kommen.
Demnach wäre der Vektor
 der Vektor, der von 0 auf A zeigt, und der Vektor der Vektor, der von 0 auf A zeigt, und der Vektor  der von A auf Punkt P zeigt. Ich suche den Vektor der von 0 auf P zeigt, also der von A auf Punkt P zeigt. Ich suche den Vektor der von 0 auf P zeigt, also
 aber, da beide komponenten von t abhängig sind komme ich ins Stocken... Ich weiß auch nicht wie ich die jeweiligen Vektoren beschreiben soll (kartesische Koordinaten, abhängig von aber, da beide komponenten von t abhängig sind komme ich ins Stocken... Ich weiß auch nicht wie ich die jeweiligen Vektoren beschreiben soll (kartesische Koordinaten, abhängig von  und und  ) )
Ich weiß nur, daß die Ableitungen, die dazugehörigen Geschwindigkeitskomponenten jeweils senkrecht auf die Ortsvektoren sind, und damit bin ich am ende meines Lateins. Das was ich brauche ist die tatsächliche Lösung dieser Aufgabe, so daß ich es kapiere.
Anya
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 17. Sep 2006 01:07 Titel: |
|
|
Ich habe eben erst anhand des Aufgabentextes und deiner Skizze verstanden, dass beide Rotationen um Achsen stattfinden sollen, die zur z-Achse parallel sind. (Denn  und und  ). Folglich liegen alle Geschwindigkeitsvektoren in der Zeichenebene deiner Skizze. ). Folglich liegen alle Geschwindigkeitsvektoren in der Zeichenebene deiner Skizze.
------------
| caliebe hat Folgendes geschrieben: | dein Ansatz scheint plausibel, sprich die Vektoren einfach vektoriell zu addieren, aber wenn es falsch ist.?
|
Sorry, da war wohl missverständlich, auf was ich mich beziehen wollte: Was nicht genau zum richtigen Ergebnis führt, ist die vektorielle Addition der beiden Bahngeschwindigkeiten.
Die Addition der beiden Vektoren, die du mit  und und  bezeichnest (diese Bezeichnungen finde ich besser als die Bezeichnungen v_1 und v_2, die wir in den beiden vorangegangenen Beiträgen für dieselben Vektoren verwendet hatten), führt hingegen auf die richtige Spur. bezeichnest (diese Bezeichnungen finde ich besser als die Bezeichnungen v_1 und v_2, die wir in den beiden vorangegangenen Beiträgen für dieselben Vektoren verwendet hatten), führt hingegen auf die richtige Spur.
--------------------------
| Zitat: |
Demnach wäre der Vektor
der Vektor, der von 0 auf A zeigt, und der Vektor der von A auf Punkt P zeigt. Ich suche den Vektor der von 0 auf P zeigt, also
aber, da beide komponenten von t abhängig sind komme ich ins Stocken...
|
Tipp: Mache das in zwei Schritten:
Im ersten Schritt betrachtest du die Situation, in der nur die Kreisschiebe, nicht aber der Stab rotiert. Dann ist nur ) zeitabhängig, und ist zeitlich konstant. zeitabhängig, und ist zeitlich konstant.
Damit bekommst du  = \vec r_A + \vec r_{AP}(t)) . Dieser Vektor . Dieser Vektor ) berücksichtigt dann nur die Drehung um A, aber noch nicht die Drehung um den Ursprung O. berücksichtigt dann nur die Drehung um A, aber noch nicht die Drehung um den Ursprung O.
 = \begin{pmatrix} L \\ 0 \end{pmatrix} + \begin{pmatrix} \cos(\omega_2 t) & -\sin(\omega_2 t) \\ \sin(\omega_2 t)& \cos(\omega_2 t) \end{pmatrix} \cdot \begin{pmatrix} R \\ 0 \end{pmatrix})
Im zweiten Schritt drehst du das ganze dann um den Ursprung:
 = \begin{pmatrix} \cos(\omega_1 t) & -\sin(\omega_1 t) \\ \sin(\omega_1 t)& \cos(\omega_1 t) \end{pmatrix} \cdot \vec r_P(t))
Der Vektor ) enthält dann sowohl die Drehung um A als auch die Drehung um den Ursprung, und du bekommst die Geschwindigkeit und die Beschleunigung des Punktes P durch Ableiten dieses Vektors nach der Zeit. enthält dann sowohl die Drehung um A als auch die Drehung um den Ursprung, und du bekommst die Geschwindigkeit und die Beschleunigung des Punktes P durch Ableiten dieses Vektors nach der Zeit.
|
|
|
caliebe
Anmeldungsdatum: 25.08.2006
Beiträge: 59
Wohnort: Rastatt
|
| caliebe Verfasst am: 17. Sep 2006 12:36 Titel: |
|
|
Mit der Herleitung deiner Matrix bin ich überfordert (Matrizen sind nicht wirklich meine Stärke.
mit  für Rotationen, integriert liefert mir für Rotationen, integriert liefert mir =r\omega t) Wie kommst du dann auf die Trigonometrischen Funktionen (umrechnen in kartesisch KS)? Wie kommst du dann auf die Trigonometrischen Funktionen (umrechnen in kartesisch KS)?
Müßte deine ) nicht die nicht die) addieren anstatt multiplizieren? addieren anstatt multiplizieren?
Wie gesagt, Matritzen und Vektoren sind alles andere als einer meiner Stärken.
Ich hatte mir überlegt:
 = \vec r_A(t) + \vec r_{AP}(t)) . .
Bei geschickter Koordinatenwahl müßte bei festlegung eines x',y'Koordinatensystems mit Ursprung im Punkt A (Rotation immer um z')folgendes bei rauskommen:
x' liegt immer auf Richtung des Armes L und bewegt sich mit.

Mit
=\begin{pmatrix} R\cos \alpha \\ R\sin\alpha \end{pmatrix})
mit )
aber das sieht ganz anders aus, als das von dir.

Und dann habe ich immer noch´nicht die Abbildung in meinem gegebenen KS um 0...
| Zitat: |
Im zweiten Schritt drehst du das ganze dann um den Ursprung:
|
|
|
|
Nikolas
Ehrenmitglied
Anmeldungsdatum: 14.03.2004
Beiträge: 1873
Wohnort: Freiburg im Brsg.
|
| Nikolas Verfasst am: 17. Sep 2006 12:46 Titel: |
|
|
Warum denn so kompliziert?
Vom Origo zum Drehzemtrum: (cos(alpha)*R,sin(alpha)*R)
Vom Drehzentrum zu deinem Punkt: (cos(alpha_2)*R_2,sin(alpha)*R_2))
die beiden Winkel kannst du dann noch als Winkelgeschwindigkeit*Zeit ausdrücken und die beiden Vektoren einfach addieren.
_________________
Nikolas, the mod formerly known as Toxman.
Erwarte das Beste und sei auf das Schlimmste vorbereitet. |
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 17. Sep 2006 13:11 Titel: |
|
|
| caliebe hat Folgendes geschrieben: |
Ich hatte mir überlegt:
.
|
| Nikolas (Toxman) hat Folgendes geschrieben: | Warum denn so kompliziert?
Vom Origo zum Drehzemtrum: (cos(alpha)*R,sin(alpha)*R)
Vom Drehzentrum zu deinem Punkt: (cos(alpha_2)*R_2,sin(alpha)*R_2))
die beiden Winkel kannst du dann noch als Winkelgeschwindigkeit*Zeit ausdrücken und die beiden Vektoren einfach addieren. |
Mit den Bezeichnungen aus der Aufgabenstellung bedeutet das:
=\begin{pmatrix} L\cos (\phi) \\ L\sin(\phi) \end{pmatrix}= \begin{pmatrix} L\cos (\omega_1 t) \\ L\sin(\omega_1 t) \end{pmatrix})
und
=\begin{pmatrix} R\cos (\alpha) \\ R\sin(\alpha) \end{pmatrix}= \begin{pmatrix} R\cos (\omega_2 t) \\ R\sin(\omega_2 t) \end{pmatrix})
Ihr habt recht, so ist es noch viel einfacher, so braucht man hier gar keine Drehmatrizen. Damit ist dann = \vec r_A(t) + \vec r_{AP}(t)) schon direkt der Vektor, den du nach der Zeit ableitest, um die Geschwindigkeit und die Beschleunigung zu erhalten. schon direkt der Vektor, den du nach der Zeit ableitest, um die Geschwindigkeit und die Beschleunigung zu erhalten.
|
|
|
caliebe
Anmeldungsdatum: 25.08.2006
Beiträge: 59
Wohnort: Rastatt
|
| caliebe Verfasst am: 17. Sep 2006 13:27 Titel: |
|
|
Den Ansatz haben wir denn nun,
was muß ich denn nun beim Ableiten beachten? Es sind ja schließlich Vektoren! Muß ich nun mit der Euler-Formel weiterrechnen?
 oder wie muß ich die Sache nun weiterverfolgen? oder wie muß ich die Sache nun weiterverfolgen?
Anya
//edit bloß welches  muß ich dann einsetzen? muß ich dann einsetzen?
Zuletzt bearbeitet von caliebe am 17. Sep 2006 13:29, insgesamt einmal bearbeitet |
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 17. Sep 2006 13:29 Titel: |
|
|
Ganz einfach jede Komponente des Vektors für sich ganz normal ableiten 
|
|
|
caliebe
Anmeldungsdatum: 25.08.2006
Beiträge: 59
Wohnort: Rastatt
|
| caliebe Verfasst am: 17. Sep 2006 14:30 Titel: |
|
|
Die Lösungen lauten dann in x-y-Koordinaten:
 = \begin{pmatrix} L cos(\omega_1 t) + R cos (\omega_2 t) \\ L sin(\omega_1 t) + R sin (\omega_1 t ) \end{pmatrix})
 = \begin{pmatrix} -L\omega_1 sin(\omega_1 t) - R\omega_2 sin (\omega_2 t) \\ L \omega_1 cos(\omega_1 t) + R \omega_2 cos (\omega_1 t ) \end{pmatrix})
 = \begin{pmatrix} - L \omega_1² cos(\omega_1 t) -R \omega_2² cos (\omega_2 t) \\ -L\omega_1² sin(\omega_1 t) - R\omega_2² sin (\omega_1 t ) \end{pmatrix})
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 17. Sep 2006 14:34 Titel: |
|
|
Einverstanden
(Dass es rechts unten in jedem dieser Ausdrücke  statt statt  heißen muss, ist sicher nur ein Tippfehler von dir gewesen) heißen muss, ist sicher nur ein Tippfehler von dir gewesen)
|
|
|
|



