
|
|
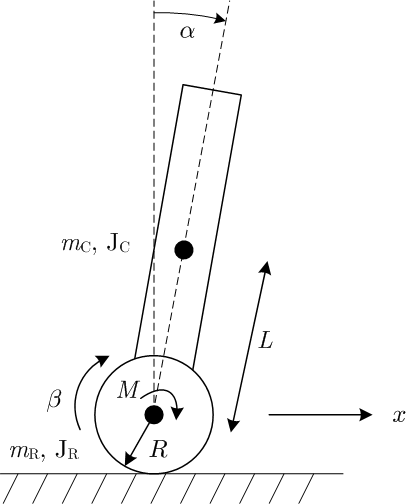
| Generalisierte Kräfte bei Segway Modellierung mit Lagrange |
| Autor | Nachricht | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| tofu Anmeldungsdatum: 10.11.2010 Beiträge: 2 |
|
|||||||||||||||||
| Chillosaurus Anmeldungsdatum: 07.08.2010 Beiträge: 2440 |
|
|||||||||||||||||
| tofu Anmeldungsdatum: 10.11.2010 Beiträge: 2 |
|
|||||||||||||||||
| Chillosaurus Anmeldungsdatum: 07.08.2010 Beiträge: 2440 |
|
|||||||||||||||||
| Verwandte Themen - die Neuesten | |||||
| Themen | Antworten | Autor | Aufrufe | Letzter Beitrag | |
|---|---|---|---|---|---|
 |
Theoretische Mechanik, Lagrange | 10 | ak!!53 | 31671 | 04. Aug 2025 17:31 ak!!53 |
|
Fahrstuhl, Kräfte beim Hochfahren | 9 | Gast | 46184 | 03. Jun 2025 10:00 A.T. |
|
Schräg angreifende Kräfte | 9 | Beni Mueller | 20505 | 22. März 2025 12:31 Mathefix |
|
Zwei Kräfte belasten einen Bolzen | 2 | Beni Mueller | 37774 | 25. Feb 2025 10:22 Beni Mueller |
|
Kräfte zwischen Punktladungen | 2 | Gast | 26266 | 16. Nov 2024 21:34 RomanGa |
| Verwandte Themen - die Größten | |||||
| Themen | Antworten | Autor | Aufrufe | Letzter Beitrag | |
|---|---|---|---|---|---|
 |
Gutachten der DPG zum Karlsruher Physikkurs (KPK) | 569 | Systemdynamiker | 2062853 | 03. Jun 2016 14:00 as_string |
 |
Kräfte auf Auflager | 70 | Gast | 41217 | 30. Jan 2018 19:31 Aries |
|
Tauben in LKW (Gewicht?) / Kräfte in beschleunigten Systemen | 67 | Vicky | 106980 | 22. Jul 2020 12:54 Frankx |
|
Kräfte und Momente | 64 | Claudini95 | 35865 | 20. Jan 2016 20:43 VeryApe |
|
Modellierung: Skateboardfahrer in Halfpipe (rekursiv) | 52 | Simonko | 27782 | 10. Jan 2005 14:37 Gast |
| Verwandte Themen - die Beliebtesten | |||||
| Themen | Antworten | Autor | Aufrufe | Letzter Beitrag | |
|---|---|---|---|---|---|
|
Gutachten der DPG zum Karlsruher Physikkurs (KPK) | 569 | Systemdynamiker | 2062853 | 03. Jun 2016 14:00 as_string |
|
Tauben in LKW (Gewicht?) / Kräfte in beschleunigten Systemen | 67 | Vicky | 106980 | 22. Jul 2020 12:54 Frankx |
|
Gelenkstäbe; Kräfte berechnen | 10 | Iggyfloyd | 68867 | 18. Jul 2024 13:11 Mathefix |
|
physikalische Kräfte Auffahrunfall | 19 | Gast | 62339 | 04. März 2011 13:01 dermarkus |
|
Fahrstuhl, Kräfte beim Hochfahren | 9 | Gast | 46184 | 03. Jun 2025 10:00 A.T. |