| Autor |
Nachricht |
yeti777

Anmeldungsdatum: 10.11.2004
Beiträge: 160
Wohnort: Schweiz
|
 yeti777 Verfasst am: 03. Jan 2005 19:00 Titel: yeti777 Verfasst am: 03. Jan 2005 19:00 Titel: |
 |
|
@ Simonko: Ich habe deine Lösung, dh. Formeln, Algorithmus und Resultate. Ich muss es nur anständig zeichnen, scannen und posten. Muss aber im Moment weg, werde den Kram aber heute noch posten.
@ Laplacus: Dein Energieansatz würde mich mächtig interessieren. Auch ich lerne gern etwas zu. Als "Elektromensch" und Ingenieur bin ich nicht sehr gewandt in der Mechanik. Ich habe volles Vertrauen in dich und erwarte deine Lösung 
Gruss yeti
_________________
Ich weiss, dass ich nichts weiss.
Sokrates 470 - 399 v.Ch. |
|
 |
Simonko_
Gast
|
| Simonko_ Verfasst am: 03. Jan 2005 19:21 Titel: |
|
|
|
differentialgleichung kann ich nicht nur differenzengleichung
|
|
|
yeti777
Anmeldungsdatum: 10.11.2004
Beiträge: 160
Wohnort: Schweiz
|
| yeti777 Verfasst am: 03. Jan 2005 20:47 Titel: |
|
|
Hallo Simonko  , ,
Hier sind deine Gleichungen und dein Vorgehen:
1. Anfangsbedingungen, k=0 (Index)
t(0)= 0, Zeit [s]
T = 0.05 [s], Zeitschritt, Wert als Beispiel
a(0) = g = 9.81 [m/s^2], Erdbeschleunigung
v(0) = 0, Geschwindigkeit des Skaters [m/s]
s(0) = 0, Weg des Skaters in der Halfpipe [m]
phi(0) = 0, Winkel zwischen x-Achse und Skater (siehe meine erste Skizze!)
x(0) = r = 6 [m], x-Koordinate des Skaters
y(0) = 0, y-Koordinate des Skaters
2. Iteration
k = k+1
t(k) = t(k-1)+T
a(k) = g*cos(s(k-1)/r)
v(k) = v(k-1)+a(k-1)*T
s(k) = s(k-1)+v(k-1)*T
phi(k) = s(k-1)/r
x(k) = r*cos(s(k)/r)
y(k) = r*sin(s(k)/r)
3. Loop
GOTO 2 UNTIL ....
Die eigentliche Knacknuss für mich war, was du mit deinen Differenzengleichungen meinst. Mathematisch gesehen löst du ein System von zwei Differentialgleichungen 1. Ordnung mit dem Polygonzugverfahren von EULER.
Das braucht dich weiter aber nicht zu kümmern . Für meine Physikerfreunde im Board habe ich eine kurze Herleitung des Verfahrens angehängt (allerdings etwas hemdsärmelig ).
Um dir den Start zu erleichtern, habe ich dir einige Bildchen angehängt:
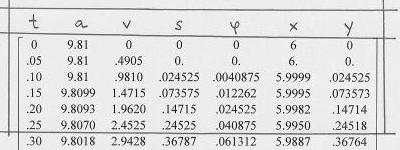
- Vorschlag für die Rechentabelle
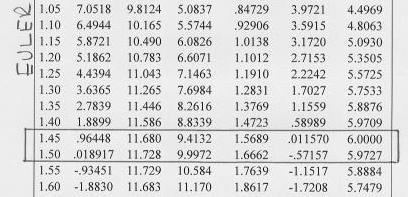
- die ersten Werte mit dem EULER-Verfahren (DEIN Differenzenverfahren)
- Werte mit EULER um den tiefsten Punkt der Halfpipe herum
Ich werde noch einen weiteren Post machen, um die Resultate mit einem genaueren Verfahren anzuschlagen, zum Vergleich mit EULER.
Viel Erfolg !
Wenn du noch Fragen hast, sei so frei!
Edit1: Der Vorschlag für die Rechentabelle fehlt, yeti.
| Beschreibung: |
|
| Dateigröße: |
23.99 KB |
| Angeschaut: |
5882 mal |
|
| Beschreibung: |
|
| Dateigröße: |
14.71 KB |
| Angeschaut: |
5886 mal |
|
| Beschreibung: |
|

Download |
| Dateiname: |
halfpipe_euler-herleitung.JPG |
| Dateigröße: |
48.1 KB |
| Heruntergeladen: |
1772 mal |
_________________
Ich weiss, dass ich nichts weiss.
Sokrates 470 - 399 v.Ch.
Zuletzt bearbeitet von yeti777 am 03. Jan 2005 20:55, insgesamt einmal bearbeitet |
|
|
yeti777
Anmeldungsdatum: 10.11.2004
Beiträge: 160
Wohnort: Schweiz
|
| yeti777 Verfasst am: 03. Jan 2005 20:53 Titel: |
|
|
Nachtrag von yeti:
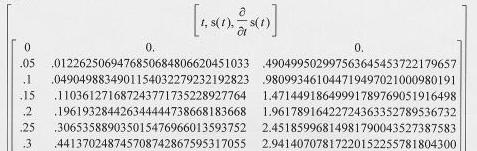
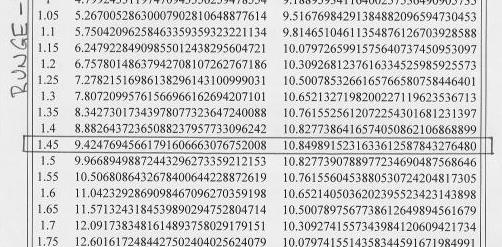
Da der Upload auf 80 kByte beschränkt ist, konnte ich die Resultate mit dem RUNGE-KUTTA-Verfahren nicht auch noch anhängen.
Hier sind sie!
Im tiefsten Punkt der Halfpipe, wo der Ort bekannt ist und die Geschwindigkeit mit Hilfe des Energiesatzes berechnet werden kann, ist der Betrag der Abweichung < 10^(-5). Nicht schlecht
Gruss yeti
| Beschreibung: |
|
| Dateigröße: |
21.06 KB |
| Angeschaut: |
6075 mal |
|
| Beschreibung: |
|
| Dateigröße: |
49.75 KB |
| Angeschaut: |
6071 mal |
|
_________________
Ich weiss, dass ich nichts weiss.
Sokrates 470 - 399 v.Ch. |
|
|
Simonko_
Gast
|
| Simonko_ Verfasst am: 03. Jan 2005 21:00 Titel: |
|
|
|
Ich bedanke mich für die antwort. der skateboard fahrer wiegt aber 70 kilo und ich muesste die reibung berücksichtigen. wie sieht denn die normalkraft auf so einer half pipe aus? wie kann ich sie errechnen?
|
|
|
Enthalpus-Laplacus

Anmeldungsdatum: 02.12.2004
Beiträge: 271
Wohnort: Bavaria
|
| Enthalpus-Laplacus Verfasst am: 03. Jan 2005 21:13 Titel: |
|
|
Hallo Simonko,
das habe ich in meinem Post auf Seite 3 ausgerechnet. (Der Teil von Anfang bis EDIT Nr. 1).

_________________
MfG
Enthalpus |
|
|
Simonko_
Gast
|
| Simonko_ Verfasst am: 03. Jan 2005 21:23 Titel: |
|
|
also in diesem fall:
FN=3*70*9,81*sin(phi) // das selbe phi wie yeti?
FR=FN*mü
a2=FR/m
a2=FR/70
a(k) = g*cos(s(k-1)/r) - a2
so stimmts jetzt oder?
|
|
|
yeti777
Anmeldungsdatum: 10.11.2004
Beiträge: 160
Wohnort: Schweiz
|
| yeti777 Verfasst am: 04. Jan 2005 13:37 Titel: |
|
|
Hallo Simonko,
Es ist Mittagspause und ich wollte mal schnell reinschauen, wie weit du bist.
Zu Fall 1, ohne Reibung: Das EULER'sche Polygonzugverfahren ist von der Konsistenzordnung 1, dh. für den Diskretisationsfehler gilt =o(T) ) für T -> 0. Das bedeutet, dass du genauere Resultate kriegst, wenn du den Zeitschritt T verkleinerst. Praktisch hat das natürlich seine Grenzen, denn da man auf jedem Rechner nur mit endlicher Stellenzahl rechnen kann, überwiegen mit immer kleiner werdendem T ab einem gewissen Punkt die Rundungsfehler. Überdies musst du natürlich mehr rechnen . für T -> 0. Das bedeutet, dass du genauere Resultate kriegst, wenn du den Zeitschritt T verkleinerst. Praktisch hat das natürlich seine Grenzen, denn da man auf jedem Rechner nur mit endlicher Stellenzahl rechnen kann, überwiegen mit immer kleiner werdendem T ab einem gewissen Punkt die Rundungsfehler. Überdies musst du natürlich mehr rechnen .
Zu Fall 2, mit Reibung: Ich kann deinen Ansatz mit Reibung, der auf der Formel von Laplacus basiert, weder bestätigen noch widerlegen, denn ich hatte noch keine Zeit, mich damit zu befassen (man muss ja auch noch was anderes tun!). Aber gib mir doch bitte den Reibungskoeffizienten  bekannt für den Fall, dass ich noch Zeit finde, mich damit zu beschäftigen. Beim Skateboard handelt es sich um Rollreibung, aber von was auf was (Gummi auf Stahl, Stahl auf Stahl)? bekannt für den Fall, dass ich noch Zeit finde, mich damit zu beschäftigen. Beim Skateboard handelt es sich um Rollreibung, aber von was auf was (Gummi auf Stahl, Stahl auf Stahl)?
Gruss yeti
_________________
Ich weiss, dass ich nichts weiss.
Sokrates 470 - 399 v.Ch. |
|
|
Simonko_
Gast
|
| Simonko_ Verfasst am: 04. Jan 2005 16:30 Titel: |
|
|
Ja ich weiss dass das delta T klein sein muss um genauere ergebnisse zu haben. wir nehmen in der schule immer 0.1 sec das reicht für unsere zwecke aus.
Nein ich glaub das ist eher gummi auf holz. Das soll jetzt auch nicht so genau sein. Wir sollen nur das Model aufstellen das mü kann man dann selbst in der Tabelle eingeben daraus errechnet die tabellenkalkulation dann neue werte.
Brauchen würd ich nur die Formel.
|
|
|
Enthalpus-Laplacus
Anmeldungsdatum: 02.12.2004
Beiträge: 271
Wohnort: Bavaria
|
| Enthalpus-Laplacus Verfasst am: 05. Jan 2005 01:50 Titel: |
|
|
Hallo Simonko,
dein Ansatz:
 = ma_R) d.h. d.h. )
somit ist dann die Gesamtbeschleunigung:
=gcos\varphi (t) - a_R=gcos\varphi (t) - 3\mu sin\varphi (t))
ist korrekt und plausibel, denn:
Die zu einem bestimmten Zeitpunkt t wird die Tangentialbeschleunigung durch die Reibung (-sbeschleunigung) vermindert.
Das es sich sozusagen um eine "Zustandsgleichung" handelt, die nicht die Periodizität der Bewegung berücksichtigt musst du sie nach dem Euler-Polygonenzugverfahren das Yeti777 beschrieben und erklärt hat Stück für Stück immer wieder zu einem späteren Zeitpunkt neu berechnen. Damit bekommst du dann den groben bewegungsablauf der Bewegung.
Zu deiner Frage bezüglich des Winkels:
Da der Winkel im Argument der Sin- und Cos- der Gleiche ist, nimmst du daher die gleichen Bedingungen für die Berechnung wie es Yeti beschreibt.
_________________
MfG
Enthalpus |
|
|
PROF
Gast
|
| PROF Verfasst am: 08. Jan 2005 00:01 Titel: |
|
|
also wenn ich der lehrer dieses schülers wäre, wäre ich ganz schön zornig, da er ja selber so gut wie nix gemacht hat 
|
|
|
yeti777
Anmeldungsdatum: 10.11.2004
Beiträge: 160
Wohnort: Schweiz
|
| yeti777 Verfasst am: 08. Jan 2005 16:09 Titel: |
|
|
@ PROF: Ich möchte SIMONKO und sein "Beraterteam" aus 2 Gründen in Schutz nehmen:
a) Die Aufgabe ist sehr unklar gestellt. Will der Lehrer wirklich eine Lösung für den Skater in der Halfpipe mit ROLLREIBUNG oder ist es nur eine analoge Aufgabenstellung wie das Fadenpendel mit grossem Ausschlag (Dank an etzwane und navajo  ) oder will er gar eine Analogie herstellen mit dem Feder/Massependel, indem hier die potentielle Energie des Skateboarders der Federenergie gleichgesetzt wird? Wozu die Angabe einer Masse (fällt beim Fadenpendel und bei der Rollreibung raus), warum wird nichts über den Reibungskoeffizienten ausgesagt, etc.? ) oder will er gar eine Analogie herstellen mit dem Feder/Massependel, indem hier die potentielle Energie des Skateboarders der Federenergie gleichgesetzt wird? Wozu die Angabe einer Masse (fällt beim Fadenpendel und bei der Rollreibung raus), warum wird nichts über den Reibungskoeffizienten ausgesagt, etc.?
b) Simonko hat nicht nichts getan! Er hat sich bemüht, die ihm vorgebrachten Vorschläge zu verstehen und umzusetzen. Für Simonko deshalb 
@ Laplacus und die anderen: Danke, dass ihr "die Stellung gehalten" habt. Ich war 2 Tage weg und bin im Moment zeitlich ziemlich angespannt.
Hallo Simonko !
Im Prinzip kannst du dich an die Lösung von Laplacus halten. Der Hinweis von etzwane und navajo haben mich aber auf die Idee gebracht, ob es hier nicht ganz einfach um die Anschauung einer ungedämpften resp. gedämpften Schwingung geht, schön verpackt mit dem Skateboarder in der Halfpipe. Deshalb habe ich die Idee von etzwane/navajo mit dem Fadenpendel aufgegriffen und noch einen anderen Lösungsansatz verfolgt. Die Masse, die beim Fadenpendel eigentlich keine Rolle spielt, habe ich in den Reibungskoeffizienten verpackt, was für diesen zu etwas unorthodoxen Dimensionen führt, aber was soll's. Ich bin von folgender Diff.gleichung ausgegangen:
}{dt^2} + \frac{\mu}{m} \cdot \frac{d\alpha(t)}{dt} + \frac{g}{r} \sin(\alpha(t)) = 0 )
alpha: Winkel zwischen der y-Achse und dem Massepunkt, mathematisch positiver Sinn
mu/m: Reibungskoeffizient, 0: ungedämpft, <>0, >0: gedämpft
g: Erdbeschleunigung
r: Radius der Halfpipe
Die Masse könnte man sich eigentlich sparen. So aber hat sie den Effekt, dass bei grösser werdender Masse die Reibung vermindert wird.
Nun zu deinen Differenzengleichungen, wiederum hergeleitet mit dem Polygonzugverfahren von EULER:
Sei y1(t) := alpha(t), Winkel im Bogenmass [-]
und y2(t) := Winkelgeschwindigkeit [1/s]
T := Zeitschritt in [s]
Anfangsbedingungen: y1(0) = Startwinkel, zB. pi/2
y2(0) = 0, Geschwindigkeit = 0!
Rekursion: y1(k) = y1(k-1) + T*y2(k-1)
y2(k) = y2(k-1) - T*(mu/m)*y2(k-1) - T*(g/r)*sin(y1(k-1)), k = 1,2,3,.....
Mit diesem Algorithmus kannst du Winkel und Winkelgeschwindigkeit berechnen. x(t) und y(t) erhältst du durch die entsprechenden Projektionen von r(t) auf die x- resp. y-Achse. Die Berechnung des Skateboarders auf der Bahn lasse ich dir als Hausaufgabe . Die Winkelbeschleunigung erhältst du durch numerische Differentiation der Winkelgeschwindigkeit. Aber aufgepasst: Das EULER-Verfahren ist ziemlich primitiv, die Resultate entsprechend "wackelig" (siehe Plots im Anhang). Durch die Differentiation findet eine zusätzliche Aufrauhung statt, sodass du bezüglich Genauigkeit nicht allzuviel erwarten kannst.
Ich habe den Algorithmus programmiert und mit dem Runge-Kutta-Verfahren verglichen. Die Resultate findest du im Anhang. Wenn's also nicht läuft, gib nicht mir die Schuld .
Falls du noch Fragen hast, stelle sie. Ich werde dann noch schnell ins Board reinschauen.
Gruss yeti
PS. Die Sache mit Vorzeichen in meinem ersten Lösungsvorschlag mit der Bogenlänge hat sich erledigt. Es kommt nur auf die Definition des Winkels an. Winkel zwischen r(t) und x-Achse -> Vorzeichen negativ, Winkel zwischen r(t) und y-Achse -> Vorzeichen positiv.
| Beschreibung: |
|
Download |
| Dateiname: |
Resultate Skateboard.doc |
| Dateigröße: |
53.5 KB |
| Heruntergeladen: |
245 mal |
_________________
Ich weiss, dass ich nichts weiss.
Sokrates 470 - 399 v.Ch. |
|
|
Gast
|
| Gast Verfasst am: 10. Jan 2005 14:37 Titel: |
|
|
|
für mich ist das alles ziemlich kompliziert und ich weiß auch nicht, warum er unbedingt das machen musste. dies ist eine hausaufgabe die abgegeben wird... hätte er das nur so zum nachdenken abgegeben und wenn es dann gemeinsam gelöst worden wäre, dann hätte ich wenige probleme damit gehabt, aber so... thx für eure hilfe
|
|
|
|
|


