| Autor |
Nachricht |
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
 w.bars Verfasst am: 22. Sep 2006 09:17 Titel: Wechselwirkungen zw. Punkthaufen in einer Computersimulation w.bars Verfasst am: 22. Sep 2006 09:17 Titel: Wechselwirkungen zw. Punkthaufen in einer Computersimulation |
 |
|
Hallo,
ich habe mal eine Frage: wenn in einer Computersimulation mehere Körper als Punkthaufen gegeben sind und diese dann sich unter Einfluss von Kräften bewegen, dann kommen sie u. U. einander ins Gehege. Da sie aber nicht deformierbar sein sollen, werden deren Bewegungen eingeschränkt. Sie können dann z. B. von dem anderen Körper abspringen oder an ihm entlang gleiten/rollen.
D. h. gesucht ist die Bewegung bei einer Kraft und Zwangsbedingung - da ich annehme, dass eine analytische Lösung deutlich komplizierter aussieht, als eine numerische, würde ich gern wissen, wie man den Ort oder eben Beschleunigungsvektor nach einer Zeiteinheit dt bei bekanntem Ort der wechselwirkender Körper und Kraftvektoren bestimmt... Aber wenn jemand eine einfache analytische Lösung parat hat, freuts mich auch - hauptsache ich muss sie verstehen.
Schon mal danke an alle
Wasilij
|
|
 |
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 22. Sep 2006 09:37 Titel: |
|
|
So eine Computersimulation arbeitet ja mit Zeitschritten. Aus der Geschwindigkeit und der Position der Teilchen (Kugeln) zum Zeitpunkt t berechnet man Geschwindigkeit und Position der Kugeln zum Zeitpunkt  . .
Wirkt keine Kraft auf eine Kugel, dann bleibt die Geschwindigkeit in dem Zeitschritt gleich, und die Position verändert sich.
Wirkt eine gleichmäßig beschleunigende Kraft (wie zum Beispiel die Schwerkraft), dann ändern sich bei dem Zeitschritt Geschwindigkeit und Position.
Elastische Stöße zwischen den Kugeln kann man einfach dadurch berücksichtigen, dass man prüft, ob sich nach einem Zeitschritt zwei Teilchen zu nahe gekommen sind, also ob der Abstand der beiden Teilchen kleiner geworden ist als die Summe ihrer Radien (Das führt die Zwangsbedingung also durch eine zusätzliche if-Abfrage ein). Wenn das der Fall ist, dann berechnet man die Geschwindigkeit und Position dieser Teilchen nicht wie oben, sondern man ersetzt die Geschwindigkeiten der beiden Kugeln nach dem Zeitschritt durch die Geschwindigkeiten nach einem kompletten elastischen Stoß. Da braucht man also gar nicht mit Beschleunigungen zu rechnen, sondern kann aus Auftreffgeschwindigkeit und Auftreffwinkel der beiden Kugeln aufeinander den Betrag und die Richtung ihrer Geschwindigkeit nach dem Stoß ausrechnen.
Das ganze kann man natürlich mit entsprechender Rechenleistung und höherem Programmieraufwand auch genauer und komplizierter gestalten, indem man z.B. Rotationen der Kugeln, Energieverluste bei nicht perfekt elastischen Stößen oder vielleicht sogar das Elastizitätsverhalten der Kugeln während einem Stoß mitberücksichtigt und im Detail modelliert.
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 22. Sep 2006 10:12 Titel: |
|
|
also ich arbeite folgendermaßen (oder vielmehr mein programm): F wird irgendwie berechnet (z.B. f = G * m * M / r^3 * r) und dann werden auch noch immer die beiden letzten positionen eines punktes gespeichert. dann lautet die gleichung für die nächste position x2 = 2*x1 - x0 + a dt^2. Deswegen arbeite ich immer mit beschleunigungen, aber geschwindigkeit lässt sich daraus ja einfach bestimmen.  das nur so. das nur so.
wenn ich das jetzt aber abgefragt habe, weiß ich ja nicht unbedingt, ob der körrper reflektiert wird oder nicht. er könnte ja auch an einer oberfläche abrollen. d. h. ich bräuchte entweder ein allgemeineres verfahren, welches auch das abrollen berücksichtigt, oder ich müsste nach einer erneuten Abfrage (übrigens was soll ich denn da abfragen?) auch noch das Abrollen irgendwie "mit rein bringen".
ich weiß wohl, dass lagrangemechanik für analytische lösungen da ne hilfe ist, aber ich weiß nicht unbedingt, ob ich wirklich damit auch in einem Programm Erfolg haben kann, vor allem weil mein programm recht allgemein ghalten ist, so dass ich nicht a priori weiß, was da für Kräfte/Zwangsbedingungen in form von körperoberflächen auftreten können. Vor allem glaube ich nicht, dass ich die ganze körperoberfläche nur für den nächsten Schritt brauche.
Andere Frage: kann man da nicht irgendwas mit dem Gradienten machen; also die Karft sozusagen wegen der zwangsbedingung "umlenken"?
Wasilij
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 22. Sep 2006 10:45 Titel: |
|
|
Eine rollende Kugel erkennt man daran, dass die Rollbedingung  erfüllt ist, und dass die Geschwindigkeitskomponente der Kugel senkrecht zu der Oberfläche, auf der sie rollt, Null ist. erfüllt ist, und dass die Geschwindigkeitskomponente der Kugel senkrecht zu der Oberfläche, auf der sie rollt, Null ist.
Wenn du auch rollende Kugeln simulieren möchtest, dann must du dich also auch um die Rotation der Kugeln kümmern.
Und weil du dann wahrscheinlich gerne auch simulieren können möchtest, wie eine Kugel vom Umherfliegen und Reflektiertwerden ins Rollen übergehen kann, benötigst du Dämpfung und Reibung, also Stöße mit Energieverlust und eine Annahme für die Reibungskoeffizienten der Oberflächen.
------------
Die Gravitationskraft zwischen den Kugeln, die du oben hinschreibst, würde ich aber erst zu allerletzt mit berücksichtigen, denn die ist sicher der kleinste Effekt bei dem ganzen.
--------------------
Was du dir da vorgenommen hast, scheint mir ein bisschen komplexer zu sein, da lohnt es sich bestimmt, sich die ganzen Formeln und Fallunterscheidungen mal in aller Ruhe sorgfältig zusammenzuschreiben; einmal mit normalen Physik- Formelzeichen und dann so wie du es konkret implementieren möchtest.
Was soll dein Programm denn am Ende können?
Wenn du irgendwo den Programmtext für ein Flipperprogramm findest und daraus schlau wirst, dürfte das eine gute Möglichkeit sein, zu sehen, wie Leute so etwas schonmal gelöst haben. Vielleicht hilft dir zum Beispiel ein Link wie dieser dabei ?
http://www.cs.brown.edu/courses/cs032/asgn/pinball_lite/pinball_lite.pdf#search=%22pinball%20program%20code%22
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 26. Sep 2006 09:33 Titel: |
|
|
ginge es denn nicht mit einer abfrage der position und dann ner umlenkung der kraft mithilfe des gradienten? so in richtung "hügelige landschaft"?
und braucht man fürs rollen immer eine reibung? ich hätte mir jetzt spontan vorstelllen können, auch ohne reibung durch richtig angreifende kraft eine rotation zu erzwingen?
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 26. Sep 2006 10:25 Titel: |
|
|
| w.bars hat Folgendes geschrieben: | ginge es denn nicht mit einer abfrage der position und dann ner umlenkung der kraft mithilfe des gradienten? so in richtung "hügelige landschaft"?
|
Ich glaube, dieser Weg dürfte für deine Zwecke komplizierter sein als nötig, denn wenn die Kraft auf die Teilchen zum Beispiel fast immer nur die Gewichtskraft der Erde ist, dann ist die Kraft überall gleich, außer die Teilchen kollidieren gerade miteinander oder mit den Wänden. Und für diese Kollisionen braucht man keine Gradientenfelder für die Kräfte, da dürfte dir ein viel einfacheres Modell genügen, das dir einfach sagt, wie die Position und die Geschwindigkeit eines Teilchens nach einem Zeitschritt sind, wenn es innerhalb dieses Zeitschritts eine Kollision erlebt hat.
| Zitat: |
und braucht man fürs rollen immer eine reibung? ich hätte mir jetzt spontan vorstelllen können, auch ohne reibung durch richtig angreifende kraft eine rotation zu erzwingen? |
Naja, diese "richtig angreifende Kraft" ist ja gerade die Haftreibungskraft. Und die muss groß genug sein, damit die Kugel nicht gleitet, sondern rollt, wenn sie beschleunigt oder gebremst wird.
Sobald du dich also nicht auf den langweiligen Fall einer Kugel beschränken möchtest, die mit konstanter Geschwindigkeit rollt, brauchst du Reibung, und zwar mindestens in Form der Rollbedingung, die annimmt, die Haftreibung sei "groß genug fürs Rollen".
Sobald du auch beschreiben können möchtest, wie eine Kugel, die durch die Gegend fliegt und an den Wänden reflektiert wird, zu einer rollenden Kugel werden kann, brauchst du Reibung in Form von nichtelastischen Kollisionen.
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 26. Sep 2006 16:34 Titel: |
|
|
| dermarkus hat Folgendes geschrieben: |
Sobald du auch beschreiben können möchtest, wie eine Kugel, die durch die Gegend fliegt und an den Wänden reflektiert wird, zu einer rollenden Kugel werden kann, brauchst du Reibung in Form von nichtelastischen Kollisionen.
|
nichtelastisch heißt doch, dass der körper nach dem zusammenstoß verformt ist, oder? das sollte in meinem programm nämlich außen vor gelassen werden, ich wolltre also nur elastische stöße betrachten, wo die körper nicht kaputtgehen.
hieße es übrigens, dass ein Rollen (welches sich sozusagen von selbst einstellt) nur dann möglich ist, wenn die körper verformbar sind?
Zuletzt bearbeitet von w.bars am 26. Sep 2006 16:38, insgesamt einmal bearbeitet |
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 26. Sep 2006 16:37 Titel: |
|
|
| dermarkus hat Folgendes geschrieben: | | da dürfte dir ein viel einfacheres Modell genügen, das dir einfach sagt, wie die Position und die Geschwindigkeit eines Teilchens nach einem Zeitschritt sind, wenn es innerhalb dieses Zeitschritts eine Kollision erlebt hat. |
und wie kriege ich das jetzt raus, wie die position und die geschwindigkeit nach einem zeitschritt ist?
wasilij
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 26. Sep 2006 16:57 Titel: |
|
|
| w.bars hat Folgendes geschrieben: |
nichtelastisch heißt doch, dass der körper nach dem zusammenstoß verformt ist, oder? |
Das kann zwar bei einem nichtelastischen Stoß vorkommen, muss es aber nicht. Ich meine hier mit nichtelastisch vor allem, dass während dem Stoß Energie verlorengeht, also dass die Summe der kinetischen Energien der beiden Stoßpartner nach dem Stoß kleiner ist als davor. Und so ein Energieverlust ist nötig, damit ein Ball, der über den Boden hüpft, irgendwann vom Hüpfen ins Rollen übergeht.
| w.bars hat Folgendes geschrieben: |
und wie kriege ich das jetzt raus, wie die position und die geschwindigkeit nach einem zeitschritt ist?
|
Für elastische Stöße: Mit dem Energieerhaltungssatz und dem Impulserhaltungssatz.
Im Spezialfall der elastischen Reflexion an einer Wand bedeutet das einfach: Einfallswinkel = Ausfallswinkel und Betrag der Einfallsgeschwindigkeit = Betrag der Ausfallsgeschwindigkeit, und wenn die Zeitschritte klein genug sind, kann man wohl in guter Näherung annehmen, dass die Position der reflektierten Kugel sich während dem Zeitschritt, in dem die Reflexion stattfindet, nicht verändert.
Aber nochmal die Frage: Wofür brauchst du das ganze, und was soll das Programm können, wenns fertig ist?
Ich erzähle da grade diverse Details, wie man dies und jenes machen könnte, aber wenn du anfängst, sowas zu programmieren, wirst du sicher als beste Strategie erstmal einfach anfangen (also mit etwas, das du selbst schon gut hinbekommen kannst), dann ausprobieren, ob das schon funktioniert, dann etwas neues dazunehmen, wieder ausprobieren, ob das schon funktioniert, etc. Und du wirst dir sicher überlegen, was du am Ende gerne geschafft haben möchtest oder solltest, und was auf der anderen Seite zwar schön wäre, aber nicht unbedingt nötig ist.
|
|
|
schnudl
Moderator

Anmeldungsdatum: 15.11.2005
Beiträge: 6979
Wohnort: Wien
|
| schnudl Verfasst am: 26. Sep 2006 17:39 Titel: |
|
|
Was du hier vorhast ist u.A. die Basis zur Simulation vom Flüssigkeiten und größeren Molekülen (Molekulardynamik). Die Berechnungen laufen genau wie oben besprochen wurde, nur dass man parallel computing verwenden kann, um die Rechenzeiten zu reduzieren. Derartige Simulationen können durchaus mehrere Wochen Rechenzeit beanspruchen. Damit kann man z.B das Verhalten von Wasermolekülen an einer Grenzschicht simulieren...
_________________
Wenn du eine weise Antwort verlangst, musst du vernünftig fragen (Goethe) |
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 27. Sep 2006 14:10 Titel: |
|
|
Hallo schnudl,
was meinst du mit computing?
wasilij
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 27. Sep 2006 14:28 Titel: |
|
|
| dermarkus hat Folgendes geschrieben: | | was soll das Programm können, wenns fertig ist? |
das programm ist übrigens natürlich schon längst in vielen teilen, die ich jetzt beschreiben werde, fertig (ich mein - die meisten details, von denen du sprachst SIND schon fertig): 
im programm sollen körper erstellt werden können (wie, ist letztendlich uninteressant), die dann zum schluss alle als punkte im vorher definierten 3D-array gespeichert werden. durch definieren von geschwindigkeiten als vektoren, die an bestimmten punkten eines körpers angreifen, und ebenso auch geschwindigkeitsvektoren, wird die bewegung festgelegt - diese soll nun simuliert werden. bisheriger stand der dinge - EIN körper bewegt sich schon unter einfluss "seiner" kräfte. das einzige, was an sich an komplizierteren dingen bleibt, ist eben die wechselwirkung zwischen körpern.
das stelle ich mir nun so vor (zB 2D): ein körper fliegt mit seiner ecke, die dann eben aus 3-4 massepunkten besteht, gegen einen anderen, bzw gegen die "grenze" eines anderen, welche sozusagen eine kette aus massepunkten darstellt. hier sehe ich auch ein gewisses problem mit dem einfallswinkel - da er nur angenähert bestimmt werden kann - denn bei einer gekrümmten fläche, auf die der andere körper drauffliegt müsste irgendwie nen ausgleich suchen aus den benachbarten punkten etc. is aber glaube ich zu schafen.
an sich soll das programm nicht viel mehr können - zumindest im groben nicht - auf schnickschnack habe ich mich noch nicht eng festgelegt.
außerdem - solange da nur energie verloren gehen kann und nicht die form des körpers - habe ich mir das eigentlich auch vorgenommen, zu programmieren, deswegen gleich zwei fragen - wie genau macht mans mit impulserhaltung? und die zweite - was mache ich, wee der stoß eben mit reibung verläuft - also nicht elastisch ist?
wasilij
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 27. Sep 2006 22:05 Titel: |
|
|
Wenn deine Körper keine Kugeln sein sollen, sondern eckig, dann wird die Modellierung der Stöße viel komplizierter, als ich es oben angedeutet habe.
(Was ich oben gesagt hatte, war alles für kugelrunde Körper gemeint.)
Dann, vermute ich, wirst du wohl leider in den sauren Apfel beißen müssen und die Stöße selbst ziemlich detailliert modellieren müssen, inclusive der Kräfte und Drehmomente, die während dieser Stöße wirken, in Abhängigkeit davon, mit welcher Ecke der eine Körper nun auf welche Stelle des anderen Körpers trifft.
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 28. Sep 2006 12:38 Titel: |
|
|
|
ne idee, wie ich das mache?
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 28. Sep 2006 12:46 Titel: |
|
|
Ich denke mal, am liebsten schrittweise.
Vielleicht magst du ja anfangen, dir zu überlegen, wann bei einem Aufeinandertreffen solcher Körper welche Kräfte und welche Drehmomente wirken?
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 26. Nov 2006 15:12 Titel: |
|
|
Hallo,
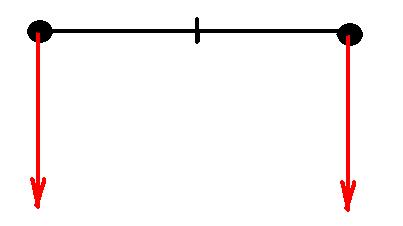
mir ist noch was aufgefallen: bist du sicher, dass die Art und weise funktioniert, wenn man den folgenden Fall hat: zwei-Punkte-Körper, an jedem der Körper eine Kraft nach unten von gleichem Betrag und Richtung. Der Körper müsste sich unrotiert nach unten bewegen, aber tut er das, wenn wi das so machen, wie oben beschrieben?
Gruß,
Wasilij
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 26. Nov 2006 15:34 Titel: |
|
|
Der Körper wird sich nur dann unrotiert nach unten bewegen, wenn seine Rotationsgeschwindigkeit vorher Null war, und wenn seine Geschwindigkeit vorher nicht gerade aufwärts gerichtet war. Zusätzlich müssen dafür die Massen der beiden Punkte deines Körpers gleich groß sein.
Meintest du vielleicht etwas anderes? Zum Beispiel:
Wenn an einem aus zwei Teilen zusammengesetzten Körper in den zwei Schwerpunkten dieser Teilkörper zwei Kräfte angreifen, deren Verhältnis dem Verhältnis der Masse der Teilkörper entspricht, und deren Richtung gleich ist, dann beschleunigen diese Kräfte den Körper in Richtung der Kräfte, ohne dabei seine Rotationsgeschwindigkeit zu verändern.
Während dem freien Flug eines Körpers wird so etwas auftreten, da hier nur die Schwerkraft wirkt. Während eines Stoßes zwischen verschiedenen Körpern dürfte so ein Fall eher die Ausnahme sein.
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 26. Nov 2006 19:04 Titel: |
|
|
hallo,
tut mir leid, ich wollte eigentlich die antwort in eine andere diskussion reinschreiben, was mir erst jetzt aufgefallen ist: egal...
hier das entsprechende zitat aus http://www.physikerboard.de/htopic,6383,.html:
Man teilt die angreifenden Kräfte so auf, dass man zum einen die Summe der im Schwerpunkt des Körpers angreifenden Kräfte (daraus bekommt man die Beschleunigung des Körpers) und zum anderen die Summe der auf den Körper wirkenden Drehmomente bezüglich einer Achse um diesen Schwerpunkt (daraus berechnet man die Winkelbeschleunigung des Körpers, also wie schnell er seine Rotationsgeschwindigkeit ändert) berechnen kann.
Genau das Beispiel, das Du zum Schluß so ausführlich dargelegt hast , wird doch bei solch einer Vorgehensweise nicht klappen, oder??
Gruß,
Wasilij
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 26. Nov 2006 19:08 Titel: |
|
|
Das klappt schon, das ist in diesem Fall sogar besonders einfach, denn das Drehmoment ist in diesem Fall
| dermarkus hat Folgendes geschrieben: |
Wenn an einem aus zwei Teilen zusammengesetzten Körper in den zwei Schwerpunkten dieser Teilkörper zwei Kräfte angreifen, deren Verhältnis dem Verhältnis der Masse der Teilkörper entspricht, und deren Richtung gleich ist, dann beschleunigen diese Kräfte den Körper in Richtung der Kräfte, ohne dabei seine Rotationsgeschwindigkeit zu verändern.
|
dann einfach Null 
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 27. Nov 2006 18:13 Titel: |
|
|
das ist schon klar, aber wird es sich auch in der Simulation so bewegen? (translatorische Bewegung nach wohin auch immer die Kräfte zeigen)
Wenn wir also nicht das betrachten, was die beiden Massen in Wirklichkeit tun / tun würden, sondern was sie in einer nach dem o. g. Prinzip aufgebauten Simulation tun würden. Denn da werden alle zur Verbindungslinie Punkt-Schwerpunkt senkrechten Kräfte in Drehmomente umgewandelt, während die entlang dieser Linie wirkenden später zur transl. Bewegung beitragen. Hier stellt der Computer erstmal keine soche Kräfte fest, sondern nur Drehmomente, welche sich anschließend ausgleichen. Die Folge ist Stillstand. Oder mache ich da einen Denkfehler??
Somit wäre ja eine transl. Bewegung in unserem Beispiel nur nach rechts-links möglich, wenn die Punkte symmetrisch um den Schwerpunkt angeordnet wären (klar, andersrum: wenn der Schwerpuhnkt exakt zwischen den beiden Massenpunkten sich befände). Aber es muss doch eine konvektion (oben-unten) ebenso möglich sein, was aber, vorwausgesetzt ich habe keinen Denkfehler, von der Simulation nicht geleistet wird?
Gruß,
Wasilij
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 28. Nov 2006 01:55 Titel: |
|
|
Ich verstehe nicht ganz, was du da meinst. Hilft dir vielleicht folgendes:
Wenn eine Kraft wirkt (die nicht im Schwerpunkt angreift), dann dreht dich der Körper um seinen Schwerpunkt. Wenn zwei Kräfte (die nicht im Schwerpunkt angreifen) gleichzeitig wirken, dann dreht sich der Körper nicht um seinen Schwerpunkt, sondern um einen anderen Punkt, und kann zusätzlich eine Kraft auf seinen Schwerpunkt erfahren.
Dies müsstest du also in deiner Simulation (und den zugehörigen Betrachtungen der wirkenden Kräfte und Momente) berücksichtigen, wenn du solche Fälle, dass mehrere Kräfte gleichzeitig auf einen deiner Körper wirken, simulieren willst. Brauchst du solche Fälle, um das zu simulieren, was du simulieren möchtest?
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 28. Nov 2006 18:58 Titel: |
|
|
hallo,
" Wenn zwei Kräfte (die nicht im Schwerpunkt angreifen) gleichzeitig wirken, dann dreht sich der Körper nicht um seinen Schwerpunkt "
Um was dreht sich der Körper denn dann???
Im Prinzip müsste ich nun auch Systeme mit mehreren Kräften simulieren: wie rechne ich die Kräfte und Drehmomente denn dann aus???
Gruß
Wasilij
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 28. Nov 2006 22:42 Titel: |
|
|
|
Was meinst du denn zum Beispiel konkret für Kräfte? In was für einem konkreten Fall kommt es in deiner Simulation vor, dass zwei Kräfte gleichzeitig auf einen Körper wirken, die beide nicht im Schwerpunkt angreifen?
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 29. Nov 2006 18:55 Titel: |
|
|
bitte, bitte:
| Beschreibung: |
| ein bild sagt mehr als tausend worte |
|
| Dateigröße: |
5.61 KB |
| Angeschaut: |
1753 mal |
|
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 29. Nov 2006 23:38 Titel: |
|
|
|
Ich meinte die Anwendung so eines Falles. Was verursacht in deiner Simulation zwei Kräfte, die beiden gleichzeitig an einem Körper angreifen und nicht in seinem Schwerpunkt angreifen? (Die Gravitation zählt dabei nicht als Beispiel, denn diesen Fall kannst du ja einfacher rechnen, nämlich als eine einzige Kraft, die im Schwerpunkt des Körpers angreift.)
|
|
|
w.bars
Anmeldungsdatum: 24.07.2006
Beiträge: 202
|
| w.bars Verfasst am: 30. Nov 2006 13:49 Titel: |
|
|
|
die simulation ist sehr benutzeroffen - der benutzer muss die möglickeit haben, alles zu tun, was er will. Er kann also sagen, ich ziehe an beiden enden des körpers mit gleicher kraft.
|
|
|
dermarkus
Administrator
Anmeldungsdatum: 12.01.2006
Beiträge: 14788
|
| dermarkus Verfasst am: 01. Dez 2006 11:19 Titel: |
|
|
| w.bars hat Folgendes geschrieben: | | der benutzer muss die möglickeit haben, alles zu tun, was er will. |
Puh, und du bist der Programmierer, der sich vorgenommen hat, das alles zu programmieren?
Für mich klingt das nach: "Ich habe vor, unendlich viel Arbeit zu machen, aber ich weiß noch nicht, wie das geht. Und ich weiß sogar nicht einmal, ob das dann jemand braucht."
Wenn du wirklich so tief in die Programmierung solcher Probleme einsteigen möchtest, dann musst du dich intensiver mit Kräften, Drehmomenten, Zwangsbedingungen, ... beschäftigen. Und mit Methoden, mit denen du diese Größen auch bei komplizierteren Problemen in den Griff bekommst.
Und mit konkreten Problemen, an denen du lernen kannst, wie andere das machen und schon geschafft haben, und welche konkreten Fälle man rechnen und mit Formeln beschreiben kann.
Um abzuschätzen, was das bedeutet, könntest du zum Beispiel mal folgendes Beispiel anschauen:
http://www.physikerboard.de/htopic,6684,kante.html
Der Link in diesem Thread verweist auf eine Doktorarbeit, die sich mit der Erstellung eines solchen Simulationsprogrammes beschäftigt hat:
http://www.icg.informatik.uni-rostock.de/archiv/Dissertationen/2001/Friedrich_Wagner/docs/diss.pdf
|
|
|
|
|

