| Autor |
Nachricht |
Johannes_Kleb
Anmeldungsdatum: 14.12.2021
Beiträge: 2
|
 Johannes_Kleb Verfasst am: 14. Dez 2021 15:57 Titel: Wie viel Nm braucht mein Schrittmotor? Johannes_Kleb Verfasst am: 14. Dez 2021 15:57 Titel: Wie viel Nm braucht mein Schrittmotor? |
 |
|
Meine Frage:
Hallo,
ich bin unbeholfen im Thema Physik und bräuchte Hilfe um rauszufinden wie viel NM mein Schrittmotor benötigt. Auch gerne andere Tipps oder Einwände zu meinem Projekt aufzuschnappen.
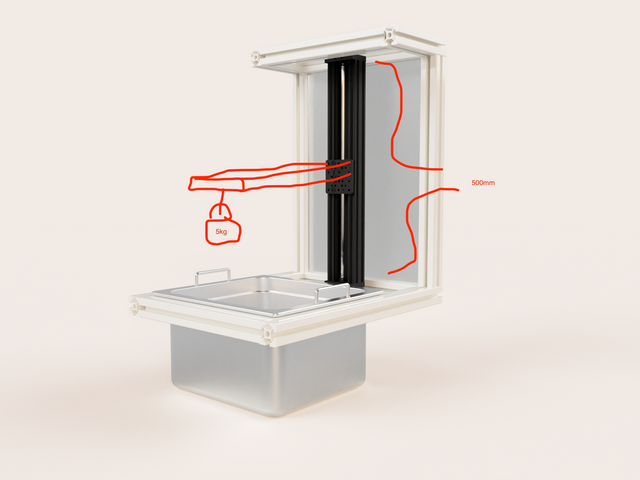
Hier ein Bild der Grundkonstruktion
Willkommen im Physikerboard!
Ich habe das Bild aus dem externem Link als Anhang eingefügt. Bitte keine externen Links verwenden.
Viele Grüße
Steffen
Meine Ideen:
Ich will 5kg mit einem Schrittmotor hoch und runter bewegen mit Arduino, auf festgelegte Höhenstufen.
(Von unten nach oben sollte es nicht unbedingt länger dauern als 10-15 Sekunden.)
Also eine Mischung auch Kran und Lift.
Bin bei der ganzen Schrittmotor Auswahl einwenig überfordert und wenn ich wenigstens wüsste wie viel NM ich brauche wäre dass schon super und auf was ich sonst noch achten sollte.
Danke für jeden Helfenden
| Beschreibung: |
|
| Dateigröße: |
169.19 KB |
| Angeschaut: |
1177 mal |
|
|
|
 |
DrStupid
Anmeldungsdatum: 07.10.2009
Beiträge: 5044
|
| DrStupid Verfasst am: 14. Dez 2021 17:29 Titel: Re: Wie viel Nm braucht mein Schrittmotor? |
|
|
| Johannes_Kleb hat Folgendes geschrieben: | | ich bin unbeholfen im Thema Physik und bräuchte Hilfe um rauszufinden wie viel NM mein Schrittmotor benötigt. |
Das hängt von der Mechanik ab. Wir müssten zumindest wissen, wie der Winkel des Motors mit der Höhe zusammen hängt - also z.B. wie hoch das Gewicht bei einer kompletten Umdrehung gehoben wird.
Auch ansonsten hängt die Auswahl des Motors davon ab, wie das Gewicht angehoben wird. Hängt es beispielsweise an einer Gewindestange, dann musst Du dir keine Gedanken darüber machen, welches Drehmoment nötig ist, um es auf einer Höhe zu halten. Wenn der Motor es ganz allein fest hält, dann muss dabei dauerhaft Strom fließen. Das ist nicht nur Energieverschwendung, sondern möglicherweise auch schlecht für den Motor.
|
|
|
Johannes_Kleb
Anmeldungsdatum: 14.12.2021
Beiträge: 2
|
| Johannes_Kleb Verfasst am: 14. Dez 2021 18:02 Titel: |
|
|
Der Motor soll an die 500mm Linearführung unten befestigt werden und den Rest hoch und runter fahren. Ansonsten ist alles steif und der Kranarm ist 90 Grad zur Linearführung. Das Gewicht ist auf der vorderen Hälfte des Armes befestigt.
| Beschreibung: |
|

Download |
| Dateiname: |
Bildschirmfoto 2021-12-14 um 17.49.56.png |
| Dateigröße: |
182.6 KB |
| Heruntergeladen: |
68 mal |
|
|
|
Mathefix
Anmeldungsdatum: 05.08.2015
Beiträge: 5867
Wohnort: jwd
|
| Mathefix Verfasst am: 15. Dez 2021 12:04 Titel: |
|
|
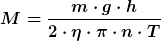
eta = Mech. Wirkungsgrad
m = Summe der zu hebenden Massen
v = Hubgeschwindigkeit
h = Hubhöhe
T = Hubzeit
a = Beschleunigung
n = Motordrehzahl

 \cdot v}{\eta }= M \cdot \omega = M \cdot 2\cdot \pi \cdot n)
\cdot v}{2\cdot \eta \cdot \pi \cdot n} )
Ist die Beschleunigung zu vernachlässigen
|
|
|
Frankx
Anmeldungsdatum: 04.03.2015
Beiträge: 982
|
| Frankx Verfasst am: 17. Dez 2021 22:47 Titel: |
|
|
| Zitat: | | und auf was ich sonst noch achten sollte. |
Üblicherweise zerlegt man den Verfahrweg in 3 Abschnitte.
Zuerst wird gleichmäßig beschleunigt, dann mit konstanter Geschwindigkeit gefahren, zum Schluss gleichmäßig abgebremst.
Die Länge der einzelnen Abschnitte ist variabel und hängt von den Parametern (max. Drehzahl, max. Drehmoment) des Motors ab.
Je kürzer die Abschnitte 1 und 3, desto mehr Drehmoment wird benötigt, desto geringer ist aber dafür auch die erforderliche Drehzahl, wenn die Gesamtverfahrzeit vorgegeben wird.
Soll der Antrieb, wie in der Aufgabenstellung angedeutet, auch zur Positionierung verwendet werden, dann muss zusätzlich das Trägheitsverhältnis von Lasträgheit zu Motoreigenträgheit beachtet werden.
Bei aktuellen Schrittmotoren wird hier ein Verhältnis bis max. 30:1 empfohlen.
Wird die Last zu groß, kann nicht mehr sauber positioniert werden.
.
|
|
|
Frankx
Anmeldungsdatum: 04.03.2015
Beiträge: 982
|
| Frankx Verfasst am: 17. Dez 2021 23:07 Titel: |
|
|
Hier mal eine Beispielrechnung.
Gesamtfahrzeit beträgt 10s, Weg=500mm.
Als Spindelsteigung wurde 10mm angenommen.
.
| Beschreibung: |
|
Download |
| Dateiname: |
Unbenannt.JPG |
| Dateigröße: |
156.46 KB |
| Heruntergeladen: |
75 mal |
|
|
|
roycy
Anmeldungsdatum: 05.05.2021
Beiträge: 961
|
| roycy Verfasst am: 18. Dez 2021 12:10 Titel: |
|
|
| Johannes_Kleb hat Folgendes geschrieben: | | Der Motor soll an die 500mm Linearführung unten befestigt werden und den Rest hoch und runter fahren. Ansonsten ist alles steif und der Kranarm ist 90 Grad zur Linearführung. Das Gewicht ist auf der vorderen Hälfte des Armes befestigt. |
Erfolgt der Hub über eine Spindelwelle?
Welche Steigung hat das Gewinde?
|
|
|
roycy
Anmeldungsdatum: 05.05.2021
Beiträge: 961
|
| roycy Verfasst am: 18. Dez 2021 12:15 Titel: |
|
|
| Mathefix hat Folgendes geschrieben: | eta = Mech. Wirkungsgrad
m = Summe der zu hebenden Massen
v = Hubgeschwindigkeit
h = Hubhöhe
T = Hubzeit
a = Beschleunigung
n = Motordrehzahl
Ist die Beschleunigung zu vernachlässigen
|
Die Berechnung ist m.E. wahrscheinlich falsch, da der Motor vermutlich eine
Spindel mit Gewinde antreibt.
Das bestimmt bei vorgegebener Hubgeschwindigkeit über die Gewindesteigung die Motordrehzahl n.
Warten wir ab, wie/ob sich der TE dazu äußert.
|
|
|
DrStupid
Anmeldungsdatum: 07.10.2009
Beiträge: 5044
|
| DrStupid Verfasst am: 18. Dez 2021 12:55 Titel: |
|
|
| roycy hat Folgendes geschrieben: | | Die Berechnung ist m.E. wahrscheinlich falsch, da der Motor vermutlich eine Spindel mit Gewinde antreibt. |
Die Art des Getriebes ist für die Berechnung egal. Neben dem mechanischen Wirkungsgrad ist nur entscheidend, wie der Winkel des Motors mit der Höhe zusammen hängt. Das ist der Term

in der Gleichung. Ob die Drehung durch eine Spindel, einen Seilzug, einen Zahnriemen oder irgend etwas anderes in eine lineare Bewegung umgesetzt wird, ist dabei völlig egal. Der Unterschied macht sich erst bemerkbar, wenn das Gewicht sich nicht bewegt.
|
|
|
Mathefix
Anmeldungsdatum: 05.08.2015
Beiträge: 5867
Wohnort: jwd
|
| Mathefix Verfasst am: 18. Dez 2021 18:06 Titel: |
|
|
| roycy hat Folgendes geschrieben: | | Mathefix hat Folgendes geschrieben: |
eta = Mech. Wirkungsgrad
m = Summe der zu hebenden Massen
v = Hubgeschwindigkeit
h = Hubhöhe
T = Hubzeit
a = Beschleunigung
n = Motordrehzahl
Ist die Beschleunigung zu vernachlässigen
|
Die Berechnung ist m.E. wahrscheinlich falsch, da der Motor vermutlich eine
Spindel mit Gewinde antreibt.
Das bestimmt bei vorgegebener Hubgeschwindigkeit über die Gewindesteigung die Motordrehzahl n.
Warten wir ab, wie/ob sich der TE dazu äußert. |
Bei einer Gewindespindel gilt folgende Beziehung:
s = Steigung der Spindel
n_s = Drehzahl der Spindel/Schlitten-Gewindemutter(bei fester Spindel)
n_m = Drehzahl des Motors
i = Übersetzungsverhältnis Motor/Spindel bzw. Schlitten-Gewindemutter
v_h = Hubgeschwindigkeit




|
|
|
roycy
Anmeldungsdatum: 05.05.2021
Beiträge: 961
|
| roycy Verfasst am: 18. Dez 2021 22:23 Titel: |
|
|
| DrStupid hat Folgendes geschrieben: | | roycy hat Folgendes geschrieben: | | Die Berechnung ist m.E. wahrscheinlich falsch, da der Motor vermutlich eine Spindel mit Gewinde antreibt. |
Die Art des Getriebes ist für die Berechnung egal. Neben dem mechanischen Wirkungsgrad ist nur entscheidend, wie der Winkel des Motors mit der Höhe zusammen hängt. Das ist der Term
|
Offensichtlich meine ich einen anderen Bautyp einer Lineareinheit als du?
|
|
|
DrStupid
Anmeldungsdatum: 07.10.2009
Beiträge: 5044
|
| DrStupid Verfasst am: 18. Dez 2021 22:52 Titel: |
|
|
| roycy hat Folgendes geschrieben: | | Offensichtlich meine ich einen anderen Bautyp einer Lineareinheit als du? |
Aber ich sagte doch gerade, dass der Bautyp egal ist. Wenn Du anderer Meinung bist, dann wäre eine Erklärung hilfreich.
|
|
|
Mathefix
Anmeldungsdatum: 05.08.2015
Beiträge: 5867
Wohnort: jwd
|
| Mathefix Verfasst am: 19. Dez 2021 11:16 Titel: |
|
|
Mechanischer Wirkungsgrad
alpha = Steigungswinkel
mü = Gleitreibungskoeffizient
 } })
|
|
|
roycy
Anmeldungsdatum: 05.05.2021
Beiträge: 961
|
| roycy Verfasst am: 19. Dez 2021 11:38 Titel: |
|
|
| Mathefix hat Folgendes geschrieben: | Mechanischer Wirkungsgrad
d = Mittlerer Gewindedurchmesser der Spindel
 =\frac{s}{d\cdot \pi })
 |
Schon mal ein ganz guter Anhaltswert- aber den tatsächlichen Wirkungsgrad kann nur der Hersteller nennen, denn es treten ja auch noch Reibungsverluste in der Lagerung der Spindel auf.
|
|
|
Mathefix
Anmeldungsdatum: 05.08.2015
Beiträge: 5867
Wohnort: jwd
|
| Mathefix Verfasst am: 19. Dez 2021 12:56 Titel: |
|
|
| roycy hat Folgendes geschrieben: | | Mathefix hat Folgendes geschrieben: | Mechanischer Wirkungsgrad
d = Mittlerer Gewindedurchmesser der Spindel
|
Schon mal ein ganz guter Anhaltswert- aber den tatsächlichen Wirkungsgrad kann nur der Hersteller nennen, denn es treten ja auch noch Reibungsverluste in der Lagerung der Spindel auf. |
Die Reibungsverluste in der Lagerung sind im Vergleich zur Reibung in dem Spindelantrieb vernachlässigbar klein. In einem z. Bsp. Rillenkugellager beträgt mü = 0,0015.
Es hätte mich auch gewundert, wenn Du kein Haar in der Suppe gefunden hättest.
Ein konstruktiver Beitrag hätte allen genützt.
|
|
|
roycy
Anmeldungsdatum: 05.05.2021
Beiträge: 961
|
| roycy Verfasst am: 19. Dez 2021 17:14 Titel: |
|
|
| Mathefix hat Folgendes geschrieben: | | roycy hat Folgendes geschrieben: | | Mathefix hat Folgendes geschrieben: | Mechanischer Wirkungsgrad
d = Mittlerer Gewindedurchmesser der Spindel
|
Schon mal ein ganz guter Anhaltswert- aber den tatsächlichen Wirkungsgrad kann nur der Hersteller nennen, denn es treten ja auch noch Reibungsverluste in der Lagerung der Spindel auf. |
Die Reibungsverluste in der Lagerung sind im Vergleich zur Reibung in dem Spindelantrieb vernachlässigbar klein.
|
Das kannst du gar nicht wissen, sondern nur der Hersteller. Weder weißt du ob bei solchen Kleingeräten Kugel- oder Gleitlager eingesetzt sind noch welchen Reibungsverlust die seitliche Führung (Stangenführung) der Einheit verursacht.
Es kommt auch noch der Wirkungsgrad des Antriebsmotors hinzu.
Es könnte u.U. sein, dass die "Spindel" den wesentlichen Wirkungsgrad- Gesamtverlust bewirkt, aber das weiß hier niemand.
Und bevor sich der TE über das Antriebsmoment Gedanken macht, würde ich erst einmal prüfen, ob die Lineareinheit das auftretende Biegemoment aus der Last*Hebelarm übernehmen kann. Den Hebelarm hat der TE nicht genannt.
|
|
|
DrStupid
Anmeldungsdatum: 07.10.2009
Beiträge: 5044
|
| DrStupid Verfasst am: 19. Dez 2021 17:46 Titel: |
|
|
| roycy hat Folgendes geschrieben: | | Und bevor sich der TE über das Antriebsmoment Gedanken macht, würde ich erst einmal prüfen, ob die Lineareinheit das auftretende Biegemoment aus der Last*Hebelarm übernehmen kann. |
Jetzt wird es wirklich albern. Es genügt Dir nicht mehr, nur die Antworten zu kritisieren. Jetzt ist sogar die Frage falsch und der TE soll sich vorher gefälligst um ein völlig anderes Problem kümmern. Du solltest mal tief durch atmen und Dich selbst fragen, was Du gar nicht wissen kannst (z.B. was der TE weiß).
|
|
|
roycy
Anmeldungsdatum: 05.05.2021
Beiträge: 961
|
| roycy Verfasst am: 19. Dez 2021 18:15 Titel: |
|
|
| DrStupid hat Folgendes geschrieben: | | roycy hat Folgendes geschrieben: | | Und bevor sich der TE über das Antriebsmoment Gedanken macht, würde ich erst einmal prüfen, ob die Lineareinheit das auftretende Biegemoment aus der Last*Hebelarm übernehmen kann. |
Jetzt wird es wirklich albern. Es genügt Dir nicht mehr, nur die Antworten zu kritisieren. Jetzt ist sogar die Frage falsch und der TE soll sich vorher gefälligst um ein völlig anderes Problem kümmern. Du solltest mal tief durch atmen und Dich selbst fragen, was Du gar nicht wissen kannst (z.B. was der TE weiß). |
Ich weiß ja schon längere Zeit, dass es hier wenig (bis keine Praktiker) gibt.
Und die Prüfung der auftretenden Biegemomente für eine Lineareinheit als Voraussetzung für deren Einsatz überhaupt ist eine grundsätzliche, essentielle Überlegung ebenso wie deren Tragfähigkeit selbst. Deine Wortwahl mit "gefälligst" möchte meinen Anmerkungen einen miesen "touch" andichten.
Aus der Fragestellung des TE erkenne ich als Konstrukteur, was er über solche Konstruktionen "weiß" u. was nicht.
Albern ist das alles nicht- nur die "Gurus" hier können nicht vertragen, wenn man deren Unwissen in bestimmten Dingen "ergänzt" oder gar hinterfragt.
"Ihr" habt wohlüberwiegend nur mit Fragen von Schülern/Studenten zu tun- nicht mit gestandenen Leuten.
|
|
|
DrStupid
Anmeldungsdatum: 07.10.2009
Beiträge: 5044
|
| DrStupid Verfasst am: 19. Dez 2021 18:22 Titel: |
|
|
|
@roycy: Danke für die Klarstellung. Ich werde Dich in Zukunft ignorieren.
|
|
|
Mathefix
Anmeldungsdatum: 05.08.2015
Beiträge: 5867
Wohnort: jwd
|
| Mathefix Verfasst am: 19. Dez 2021 20:09 Titel: |
|
|
| DrStupid hat Folgendes geschrieben: | | @roycy: Danke für die Klarstellung. Ich werde Dich in Zukunft ignorieren. |
@DrStupid: Ich schließe mich an.
|
|
|
Frankx
Anmeldungsdatum: 04.03.2015
Beiträge: 982
|
| Frankx Verfasst am: 19. Dez 2021 20:18 Titel: |
|
|
Als "gestandener Konstrukteur" finde ich die Frage nach dem Wirkungsgrad zwar interessant, aber unwesentlich.
Meine überschlägige Antriebsauslegungen mache ich seit Jahren mit meiner billigen Excelliste, ohne Berücksichtigung des Wirkungsgrades.
Jeder Antrieb wird sowieso mit genügend Reserve versehen, da kommt es auf 5 bis 10% Verlust durch Wirkungsgrad nicht an, zumal die genauen Werte für Wirkungsgrade eher spekulativ sind.
Zur Sicherheit wird dann nach Festlegung eines Herstellers jeder Antrieb vom Hersteller selbst noch mal nachgerechnet. Die haben für jeden Teil der Konstruktion die Möglichkeit der Berücksichtigung des Wirkungsgrades in ihren Auslegungsprogrammen enthalten.
Bis jetzt wurden meine überschlägigen Berechnungen immer bestätigt.
Man gibt einfach prinzipiell eine Reserve beim Drehmoment von wenigstens 20%, besser noch etwas mehr, hinzu.
Beim Drehmoment muss u.U. das erhöhte erforderliche Drehmoment beim Anfahren (Beschleunigungsphase) berücksichtigt werden. (siehe Drehmoment im Bereich 1 in obiger Beispielrechnung) Im vorliegenden Fall, spielt das aber wohl eine untergeordnete Rolle, da nicht sehr dynamisch verfahren wird.
Niemand betreibt solche Antriebe von vornherein an der Kotzgrenze. Das passiert höchstens mal durch spätere unvorhergesehene Änderungen an der Konstruktion (zusätzliche bewegte Massen), wenn dann aber am Antrieb nichts mehr geändert werden kann/darf.
Wichtiger ist, wie bereits oben angesprochen, die Frage nach dem Trägheitsverhältnis, sofern der Antrieb zur genauen Positionierung des Schlittens verwendet werden soll.
Das kann natürlich erst nach Festlegung eines Motors geprüft werden.
Gegebenenfalls muss ein größerer Motor, dann mit zusätzlicher Übersetzung, verwendet werden.
Wird das nicht berücksichtigt, dann schafft es der Motor bezüglich Drehmoment und Drehzahl vielleicht zwar, den Schlitten in der vorgegebenen Zeit von A nach B zu fahren, aber der hält nicht an der vorgegebenen Position an oder schwingt lange um den gewünschten Punkt, je nach Steuerungs- bzw. Regelungssystem)
.
edit
| Zitat: | Es kommt auch noch der Wirkungsgrad des Antriebsmotors hinzu.
|
Der Wirkungsgrad des Motors muss hier in der mechanischen Auslegung definitiv nicht berücksichtigt werden.
Der Hersteller garantiert an der Motorwelle das im Datenblatt angegebene max. Moment und max. Drehzahl.
Der Wirkungsgrad des Motors wird erst bei Auslegung der elektrischen Parameter wieder interessant.
.
|
|
|
roycy
Anmeldungsdatum: 05.05.2021
Beiträge: 961
|
| roycy Verfasst am: 19. Dez 2021 22:04 Titel: |
|
|
| Frankx hat Folgendes geschrieben: | Als "gestandener Konstrukteur" finde ich die Frage nach dem Wirkungsgrad zwar interessant, aber unwesentlich.
Meine überschlägige Antriebsauslegungen mache ich seit Jahren mit meiner billigen Excelliste, ohne Berücksichtigung des Wirkungsgrades.
Jeder Antrieb wird sowieso mit genügend Reserve versehen, da kommt es auf 5 bis 10% Verlust durch Wirkungsgrad nicht an, zumal die genauen Werte für Wirkungsgrade eher spekulativ sind.
Zur Sicherheit wird dann nach Festlegung eines Herstellers jeder Antrieb vom Hersteller selbst noch mal nachgerechnet. Die haben für jeden Teil der Konstruktion die Möglichkeit der Berücksichtigung des Wirkungsgrades in ihren Auslegungsprogrammen enthalten.
Bis jetzt wurden meine überschlägigen Berechnungen immer bestätigt.
Man gibt einfach prinzipiell eine Reserve beim Drehmoment von wenigstens 20%, besser noch etwas mehr, hinzu.
Beim Drehmoment muss u.U. das erhöhte erforderliche Drehmoment beim Anfahren (Beschleunigungsphase) berücksichtigt werden. (siehe Drehmoment im Bereich 1 in obiger Beispielrechnung) Im vorliegenden Fall, spielt das aber wohl eine untergeordnete Rolle, da nicht sehr dynamisch verfahren wird.
Niemand betreibt solche Antriebe von vornherein an der Kotzgrenze. Das passiert höchstens mal durch spätere unvorhergesehene Änderungen an der Konstruktion (zusätzliche bewegte Massen), wenn dann aber am Antrieb nichts mehr geändert werden kann/darf.
Wichtiger ist, wie bereits oben angesprochen, die Frage nach dem Trägheitsverhältnis, sofern der Antrieb zur genauen Positionierung des Schlittens verwendet werden soll.
Das kann natürlich erst nach Festlegung eines Motors geprüft werden.
Gegebenenfalls muss ein größerer Motor, dann mit zusätzlicher Übersetzung, verwendet werden.
Wird das nicht berücksichtigt, dann schafft es der Motor bezüglich Drehmoment und Drehzahl vielleicht zwar, den Schlitten in der vorgegebenen Zeit von A nach B zu fahren, aber der hält nicht an der vorgegebenen Position an oder schwingt lange um den gewünschten Punkt, je nach Steuerungs- bzw. Regelungssystem)
.
edit
| Zitat: | Es kommt auch noch der Wirkungsgrad des Antriebsmotors hinzu.
|
Der Wirkungsgrad des Motors muss hier in der mechanischen Auslegung definitiv nicht berücksichtigt werden.
Der Hersteller garantiert an der Motorwelle das im Datenblatt angegebene max. Moment und max. Drehzahl.
Der Wirkungsgrad des Motors wird erst bei Auslegung der elektrischen Parameter wieder interessant.
. |
Ich würde ohnehin mit einem Sicherheitsfaktor von ca. 2 arbeiten u. damit solche unnötigen Feinheiten von vornherein "erschlagen".
Aber hier geht's ja bei einigen postern immer um die "mys".
|
|
|
roycy
Anmeldungsdatum: 05.05.2021
Beiträge: 961
|
| roycy Verfasst am: 19. Dez 2021 22:07 Titel: |
|
|
| DrStupid hat Folgendes geschrieben: | | @roycy: Danke für die Klarstellung. Ich werde Dich in Zukunft ignorieren. |
Danke für die Nachricht aus dem "Lehrerzimmer".
Praktische Erfahrung habt "Ihr" wohl nicht.
|
|
|
roycy
Anmeldungsdatum: 05.05.2021
Beiträge: 961
|
| roycy Verfasst am: 19. Dez 2021 22:09 Titel: |
|
|
| Frankx hat Folgendes geschrieben: |
Wird das nicht berücksichtigt, dann schafft es der Motor bezüglich Drehmoment und Drehzahl vielleicht zwar, den Schlitten in der vorgegebenen Zeit von A nach B zu fahren, aber der hält nicht an der vorgegebenen Position an oder schwingt lange um den gewünschten Punkt, je nach Steuerungs- bzw. Regelungssystem)
.
edit
| Zitat: | Es kommt auch noch der Wirkungsgrad des Antriebsmotors hinzu.
|
Der Hersteller garantiert an der Motorwelle das im Datenblatt angegebene max. Moment und max. Drehzahl.
. |
Na, welcher denn?
|
|
|
Frankx
Anmeldungsdatum: 04.03.2015
Beiträge: 982
|
| Frankx Verfasst am: 19. Dez 2021 22:46 Titel: |
|
|
Ich verstehe die Frage nicht.
Das erreichbare Drehmoment findet man im Datenblatt jedes Herstellers.
Die erreichbare Drehzahl hängt bei Schrittmotoren von der Kombination Steuermodul-Motor ab.
Üblich sind bis ca. 1000 U/min.
Theoretisch geht auch mehr, allerdings auf Kosten der Lebensdauer.
Zudem sinkt das verfügbare Drehmoment mit der Drehzahl.
Wenn man bei Schrittmotoren mit ca. 500 U/min rechnet, ist man meist auf der sicheren Seite.
Wenn man es noch genauer wissen will, benötigt man die Drehzahl-Drehmomentkennlinie.
Für den obigen Anwendungsfall habe ich in meiner Beispielrechnung als Eingangsdrehzahl an der Spindel (Steigung 10mm) etwas über 400 U/min, das sieht also gut machbar aus.
.
|
|
|
Mathefix
Anmeldungsdatum: 05.08.2015
Beiträge: 5867
Wohnort: jwd
|
| Mathefix Verfasst am: 20. Dez 2021 09:43 Titel: |
|
|
| Frankx hat Folgendes geschrieben: |
Für den obigen Anwendungsfall habe ich in meiner Beispielrechnung als Eingangsdrehzahl an der Spindel (Steigung 10mm) etwas über 400 U/min, das sieht also gut machbar aus. |
h = 500 mm
T = 10 s
s = 10 mm

n = 300 1/min
|
|
|
roycy
Anmeldungsdatum: 05.05.2021
Beiträge: 961
|
| roycy Verfasst am: 20. Dez 2021 09:59 Titel: |
|
|
| Frankx hat Folgendes geschrieben: | Als "gestandener Konstrukteur" finde ich die Frage nach dem Wirkungsgrad zwar interessant, aber unwesentlich.
Meine überschlägige Antriebsauslegungen mache ich seit Jahren mit meiner billigen Excelliste, ohne Berücksichtigung des Wirkungsgrades.
| Zitat: | Es kommt auch noch der Wirkungsgrad des Antriebsmotors hinzu.
|
. |
Ich komme ohne EXCEL- Liste zu etwas anderen Werten: Motordrehzahl ca. 300 1/min statt deiner ca 428 1/min u. deshalb ist das erf. Drehmoment auch etwas anders.( ca 0,083 Nm), so dass man mit einem Sicherheitszuschlag von ca. 2 ein Motor mit ca. 0,16-0,2 Nm bei ca. 300 1/min evtl. passend wäre.
Wie hast du denn die Drehzahl errechnet, so dass eine solche Abweichung zustande kommt?
|
|
|
DrStupid
Anmeldungsdatum: 07.10.2009
Beiträge: 5044
|
| DrStupid Verfasst am: 20. Dez 2021 10:00 Titel: |
|
|
| Mathefix hat Folgendes geschrieben: |
h = 500 mm
T = 10 s
s = 10 mm
n = 300 1/min |
Das ist die mittlere Drehzahl über die komplette Bewegung - einschießlich der Beschleunigungsrampen. Für die Phase konstanter (maximaler) Geschwindigkeit gilt
h = 286 mm
T = 4 s
|
|
|
Frankx
Anmeldungsdatum: 04.03.2015
Beiträge: 982
|
| Frankx Verfasst am: 20. Dez 2021 10:10 Titel: |
|
|
| Zitat: | Für die Phase konstanter (maximaler) Geschwindigkeit gilt
h = 286 mm
T = 4 s
|
Korrekt.
Das sind die Werte aus meiner oben angegebenen Excel-Liste.
Man kann natürlich die einzelnen Bereiche noch variieren. Dann erhält man z.B. niedrigere Momente, aber höher Drehzahl oder umgekehrt.
Für den Einstieg in die überschlägige Berechnung setze ich meist ca. 1/3 der Gesamtzeit für jeden der 3 Bereiche.
.
|
|
|
Mathefix
Anmeldungsdatum: 05.08.2015
Beiträge: 5867
Wohnort: jwd
|
| Mathefix Verfasst am: 20. Dez 2021 11:11 Titel: |
|
|
| Frankx hat Folgendes geschrieben: | | Zitat: | Für die Phase konstanter (maximaler) Geschwindigkeit gilt
h = 286 mm
T = 4 s
|
Korrekt.
Das sind die Werte aus meiner oben angegebenen Excel-Liste.
Man kann natürlich die einzelnen Bereiche noch variieren. Dann erhält man z.B. niedrigere Momente, aber höher Drehzahl oder umgekehrt.
Für den Einstieg in die überschlägige Berechnung setze ich meist ca. 1/3 der Gesamtzeit für jeden der 3 Bereiche.
|
Ich will Deine Rechnung nur verstehen und versuche sie nachzuvollziehen:
3 Phasen: 1. Beschleunigung von 0 auf v; 2. Konstante Geschwindigkeit v; 3. Bremsen von v auf 0.
Jede Phase soll sich über 1/3 der Gesamtzeit T erstrecken.


)



n = 7,5 1/s
n = 450 1/min
|
|
|
DrStupid
Anmeldungsdatum: 07.10.2009
Beiträge: 5044
|
| DrStupid Verfasst am: 20. Dez 2021 12:49 Titel: |
|
|
| Mathefix hat Folgendes geschrieben: | | Jede Phase soll sich über 1/3 der Gesamtzeit T erstrecken. |
"ca. 1/3"
In der Beispielrechnung sind es 3+4+3 Sekunden. Wie man das genau aufteilt, hängt von den Spezifikationen des Motors ab. Die Rampe darf nicht so steil werden, dass der Motor Schritte auslässt oder sogar summend stehen bleibt. Bei einer kürzeren Gesamtstrecke kann das bedeuten, dass die maximale Geschwindigkeit gar nicht erreicht wird und die zweite Phase verschwindet.
|
|
|
Mathefix
Anmeldungsdatum: 05.08.2015
Beiträge: 5867
Wohnort: jwd
|
| Mathefix Verfasst am: 20. Dez 2021 13:04 Titel: |
|
|
| DrStupid hat Folgendes geschrieben: | | Mathefix hat Folgendes geschrieben: | | Jede Phase soll sich über 1/3 der Gesamtzeit T erstrecken. |
"ca. 1/3"
In der Beispielrechnung sind es 3+4+3 Sekunden. Wie man das genau aufteilt, hängt von den Spezifikationen des Motors ab. Die Rampe darf nicht so steil werden, dass der Motor Schritte auslässt oder sogar summend stehen bleibt. Bei einer kürzeren Gesamtstrecke kann das bedeuten, dass die maximale Geschwindigkeit gar nicht erreicht wird und die zweite Phase verschwindet. |
Danke!
Ich kenne mich in dem Gebiet nicht aus. Wollte nur die Systematik verstehen.
Im Vergleich zur Erdbeschleunigung ist die Beschleunigung auf die konstante Geschwindigkeit sehr gering: 0,075 m/s^2. Gesamtbeschleunigung ca. 10 m/s^2
Ist aber vllt. nur ein kleines Motörchen ...
Ich glaube das Thema ist jetzt erschöpfend behandelt.
|
|
|
DrStupid
Anmeldungsdatum: 07.10.2009
Beiträge: 5044
|
| DrStupid Verfasst am: 20. Dez 2021 13:37 Titel: |
|
|
| Mathefix hat Folgendes geschrieben: | | Im Vergleich zur Erdbeschleunigung ist die Beschleunigung auf die konstante Geschwindigkeit sehr gering: 0,075 m/s^2. |
Von der Erdbeschleunigung bleibt durch die Spindel nicht viel übrig. Anstelle des kompletten Gewichtes, wirkt nur die Hangabtriebskraft. Die ist aufgrund der geringen Steigung sehr klein und sollte im Stillstand nicht einmal die Reibung überwinden. Dadurch steigt der Anteil des Drehmomentes, das nicht vom Gewicht abhängt (z.B. für die Beschleunigung der Spindel).
Das würde anders aussehen, wenn das Gewicht ohne Getriebe z.B. mit einem Zahnriemen direkt am Motor hängt. So eine Konstruktion wäre aber alles andere als effektiv.
|
|
|
Frankx
Anmeldungsdatum: 04.03.2015
Beiträge: 982
|
| Frankx Verfasst am: 20. Dez 2021 21:09 Titel: |
|
|
| Zitat: | | Die ist aufgrund der geringen Steigung sehr klein und sollte im Stillstand nicht einmal die Reibung überwinden. |
Die Steigung allein sagt noch nichts über den Gleitwinkel aus, da der auch vom Spindeldurchmesser abhängig ist.
Darüber hinaus gibt es auch Kugelumlaufspindeln. Bei denen ist die Reibung noch mal deutlich geringer.
| Zitat: | | Das würde anders aussehen, wenn das Gewicht ohne Getriebe z.B. mit einem Zahnriemen direkt am Motor hängt. So eine Konstruktion wäre aber alles andere als effektiv. |
Entscheidend ist "Hub pro Umdrehung", egal ob Spindel oder Zahnriemen.
Das Problem ist, dass Motoren mit größerem Moment und niedrigerer Drehzahl geometrisch deutlich größer sind, als Motoren mit kleinerem Moment aber größerer Drehzahl bei gleicher Leistung.
.
|
|
|
|


