| Autor |
Nachricht |
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
 01detlef Verfasst am: 19. Dez 2008 17:00 Titel: Lagrange-Bewegungsgleichung 01detlef Verfasst am: 19. Dez 2008 17:00 Titel: Lagrange-Bewegungsgleichung |
 |
|
Hallo,
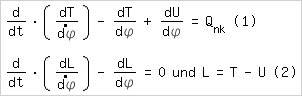
ich habe von einem System die kinetische und potentielle Energie berechnet:Nun habe ich in meinem Skript die Gleichung (1) stehen und im Buch steht Gleichung (2).
Q_n.k. ist die nichtkonservative Kraft und die kann ich bei dem System auch berechnen.
Aber meine Frage ist nun, man muss doch mit Gleichung 1 und 2 auf das gleiche Ergebnis kommen oder nicht? Das schaffe ich aber nicht mal ansatzweise!detlef
| Beschreibung: |
|
| Dateigröße: |
14.92 KB |
| Angeschaut: |
7760 mal |
|
Zuletzt bearbeitet von 01detlef am 19. Dez 2008 18:19, insgesamt einmal bearbeitet |
|
 |
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
| 01detlef Verfasst am: 19. Dez 2008 17:05 Titel: |
|
|
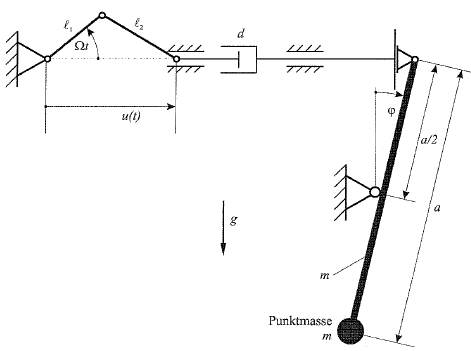
Hier noch das System:
| Beschreibung: |
|
| Dateigröße: |
34.17 KB |
| Angeschaut: |
7757 mal |
|
|
|
|
sax

Anmeldungsdatum: 10.05.2005
Beiträge: 377
Wohnort: Magdeburg
|
| sax Verfasst am: 20. Dez 2008 19:08 Titel: |
|
|
Die linke Seite von Gleichung (1) und (2) sind identisch,
da
 )

Bei Gleichung 2 steht aber auf der rechten Seite eine Null. Das liegt daran
das diese Gleichung nur für konserative Systeme gilt, währen Gl. 1 eine erwiterung der Euler Lagrande gleichung ist. Wenn du in gleichung 2 anstelle der Null auch das Q benutzt solltest du aufs gleiche Ergebnis kommen.
_________________
Der Horizont vieler Menschen ist ein Kreis mit Radius Null - und das nennen sie ihren Standpunkt. |
|
|
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
| 01detlef Verfasst am: 22. Dez 2008 09:47 Titel: |
|
|
Hallo,
okay und was ist das Q? Wie kann man das berechnen?
detlef
|
|
|
erkü

Anmeldungsdatum: 23.03.2008
Beiträge: 1414
|
| erkü Verfasst am: 23. Dez 2008 02:57 Titel: |
|
|
Hi,
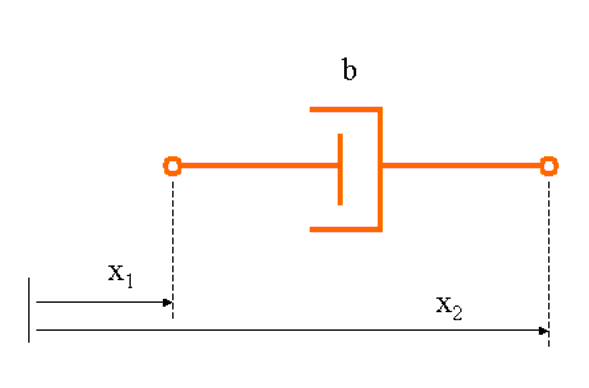
Q ist die Kraft, die vom Dämpfer entwickelt wird.
Ihr habt doch sicher den funktionalen Zusammenhang zwischen der Dämpferkraft und einer Bewegungsgröße (Auslenkung, Geschw. oder Beschleunigung) definiert. 
Ciao erkü
_________________
Das Drehmoment ist der Moment, wo es zu drehen anfängt. :punk: |
|
|
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
| 01detlef Verfasst am: 23. Dez 2008 11:08 Titel: |
|
|
Hallo,
also meinst du mit Zusammenhang x'*b = F_b ? Was ist denn allgemein Q, also wie bestimmt man das "immer"?
detlef
|
|
|
erkü
Anmeldungsdatum: 23.03.2008
Beiträge: 1414
|
| erkü Verfasst am: 24. Dez 2008 00:33 Titel: |
|
|
| 01detlef hat Folgendes geschrieben: | Hallo,
also meinst du mit Zusammenhang x'*b = F_b ? Was ist denn allgemein Q, also wie bestimmt man das "immer"?
detlef |
wenn Du damit ausdrücken willst, dass die Dämpferkraft proportional der Geschwindigkeit am Dämpfer ist, OK!
Q ist allgemein eine Kraft (oder Drehmoment), deren Größe nicht aus einem Potenzial abgeleitet werden kann, wie Reibungskräfte oder Reibungsmomente, die einem beliebigen Funktionsgesetz gehorchen (linear, quadratisch oder sonst wie).
Ciao erkü
_________________
Das Drehmoment ist der Moment, wo es zu drehen anfängt. :punk: |
|
|
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
| 01detlef Verfasst am: 24. Dez 2008 10:05 Titel: |
|
|
Ok,
und wie würdest du Q bestimmen? Man kann ja die Arbeit berechnen und dann nach der generalisierten Koordinate ableiten oder? Aber die Arbeit muss man immer im Bezug auf die generalisierte Koordinate bestimmen oder?
detlef
|
|
|
aVague
Anmeldungsdatum: 04.10.2008
Beiträge: 186
|
| aVague Verfasst am: 24. Dez 2008 16:41 Titel: |
|
|
Q ist fur jede koordinate berechnet (fur  , so hast du nur eine, da T=T( , so hast du nur eine, da T=T( ) )
|
|
|
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
| 01detlef Verfasst am: 25. Dez 2008 18:49 Titel: |
|
|
@aVague was meinst du damit?
Wenn man mehrere generalisierte Koordinaten hat, dann muss man Q für alle Koordinaten berechnen oder wie?
detlef
|
|
|
schnudl
Moderator

Anmeldungsdatum: 15.11.2005
Beiträge: 6979
Wohnort: Wien
|
| schnudl Verfasst am: 25. Dez 2008 23:43 Titel: |
|
|
Die Generalisierte Kraft ist durch die virtuelle Arbeit bestimmbar:

In deinem Fall hast du zwei Freiheitsgrade, nämlich den rechten Winkel und die Lage des Gestänges links. Das wären zwei generalisierte Kräfte.
Hilft dir das weiter? Ich muss aber zugeben, dass ich es nicht in aller Tiefe analysiert habe, sondern nur grob drübergeflogen bin.
_________________
Wenn du eine weise Antwort verlangst, musst du vernünftig fragen (Goethe) |
|
|
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
| 01detlef Verfasst am: 26. Dez 2008 09:47 Titel: |
|
|
Hallo,
@schnudl ich glaube, dass ich zu wenig über die Aufgabe gesagt habe! Die Stangen links sind masselos, also nur um u(t) zu beschreiben braucht man die!
Ich verstehe nicht, wie man die virtuelle Arbeit bei einem System bestimmt, dass zwei oder mehr generalisierte Koordinaten hat und muss man dann um Q zu erhalten nach allen generalisierten Koordinaten ableiten?
detlef
|
|
|
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
| 01detlef Verfasst am: 26. Dez 2008 10:14 Titel: |
|
|
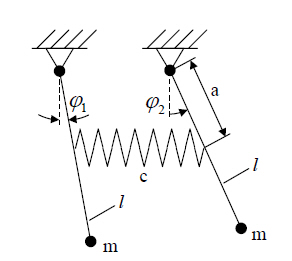
z.b. so ein System:
Wie bestimmt man da die virtuelle Arbeit, wenn man zwischen den Pendeln einen Dämpfer einbaut!
detlef
| Beschreibung: |
|
| Dateigröße: |
24.06 KB |
| Angeschaut: |
6712 mal |
|
|
|
|
erkü
Anmeldungsdatum: 23.03.2008
Beiträge: 1414
|
| erkü Verfasst am: 26. Dez 2008 19:27 Titel: |
|
|
Hi,
bleiben wir zunächst bei Deiner ersten Aufgabe, dem Kurbeltrieb.
Die Dämpferkraft Q ist proportional der relativen Geschwindigkeit am Dämpfer. Das linke Ende vom Dämpfer wird mit der Geschw. vom Kurbeltrieb und das rechte Ende mit der Geschw. vom Stangenende bewegt.
Es gilt also folgende Beziehungen zu ermitteln:
 \quad und \quad \dot{x}=g(\varphi))
Jetzt solltest Du Dir noch überlegen, wann die Dämpferkraft Null wird.
Für Dein Doppelpendel mit Dämpfung gilt im Prinzip Ähnliches.
Ciao erkü
_________________
Das Drehmoment ist der Moment, wo es zu drehen anfängt. :punk: |
|
|
aVague
Anmeldungsdatum: 04.10.2008
Beiträge: 186
|
| aVague Verfasst am: 26. Dez 2008 20:05 Titel: |
|
|
| 01detlef hat Folgendes geschrieben: | @aVague was meinst du damit?
Wenn man mehrere generalisierte Koordinaten hat, dann muss man Q für alle Koordinaten berechnen oder wie?
detlef |
ja, mit "analogish"(dT/d koordinate mit punkt-dT/d koordinate=Q_koordinate) Formelen
|
|
|
aVague
Anmeldungsdatum: 04.10.2008
Beiträge: 186
|
| aVague Verfasst am: 26. Dez 2008 20:08 Titel: |
|
|
| schnudl hat Folgendes geschrieben: | Die Generalisierte Kraft ist durch die virtuelle Arbeit bestimmbar:
In deinem Fall hast du zwei Freiheitsgrade, nämlich den rechten Winkel und die Lage des Gestänges links. Das wären zwei generalisierte Kräfte.
Hilft dir das weiter? Ich muss aber zugeben, dass ich es nicht in aller Tiefe analysiert habe, sondern nur grob drübergeflogen bin. |
zu shwer fur das , nehmen Sie besser diese Frage in andere Theme, dann konnen wir es diskutieren , da da es einige unklaren Sachen geben
|
|
|
aVague
Anmeldungsdatum: 04.10.2008
Beiträge: 186
|
| aVague Verfasst am: 26. Dez 2008 20:16 Titel: |
|
|
| 01detlef hat Folgendes geschrieben: | z.b. so ein System:
Wie bestimmt man da die virtuelle Arbeit, wenn man zwischen den Pendeln einen Dämpfer einbaut!
detlef |
diese Aufgabe ist fur partialen Freqenz geschafft , da gibt kein 
die virtuelle Arbeit hier ist nicht die beste Variante , weil es fur die Zeit "empfindlich" ist und  ist fur die Zeit nicht "empfindlich" ist fur die Zeit nicht "empfindlich"
hier soll Bild mit zwei Schwenglen sein
|
|
|
schnudl
Moderator
Anmeldungsdatum: 15.11.2005
Beiträge: 6979
Wohnort: Wien
|
| schnudl Verfasst am: 26. Dez 2008 21:40 Titel: |
|
|
| Zitat: | diese Aufgabe ist fur partialen Freqenz geschafft , da gibt kein Qi
die virtuelle Arbeit hier ist nicht die beste Variante , weil es fur die Zeit "empfindlich" ist und ist fur die Zeit nicht "empfindlich" |
@aVague: leider kann ich dir nicht folgen was du meinst...
Das Beispiel von @01detlef ist meiner Ansicht nach sogar sehr gut gewählt, um das Prinzip der virtuellen Arbeit zu zeigen. Was soll daran schlecht sein? Es konzentriert sich doch auf das Wesentliche...

@01detlef:
| 01detlef hat Folgendes geschrieben: | | ...Wie bestimmt man da die virtuelle Arbeit, wenn man zwischen den Pendeln einen Dämpfer einbaut! |
Die virtuelle Arbeit egibt sich aus der Arbeit die man in das Zusammendrücken des Dämpfers steckt, wenn sich  und und  ändern: ändern:
Die aufzubringene Kraft ist (ich nehme der Einfachheit halber an dass die Federn am Abstand r=l, d.h. direkt an den Massen befestigt sind):
 )
und die Arbeit
}_{F} \cdot \underbrace{l (\delta \varphi_1-\delta \varphi_2)}_{\delta s})
Daraus ergibt sich durch Koeffizientenvergleich
)
und
)
Wenn du das in die Lagrangegleichungen einsetzt, bekommst du die richtigen Bewegungsgleichungen, und zwar ohne wenn und aber! Genauso geht das für dein originales Beispiel. Du hast dort auch zwei unabhängige Koordinaten, auch wenn die Masse des Gestänges verschwindet.
_________________
Wenn du eine weise Antwort verlangst, musst du vernünftig fragen (Goethe) |
|
|
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
| 01detlef Verfasst am: 27. Dez 2008 13:19 Titel: |
|
|
Okay,
also die Arbeit einmal nach phi1 und einmal nach phi2 ableiten!
Bei dem Kurbeltrieb habe ich gerade ein Problem mit den Vorzeichen für die Dämpferkrafterregung!
Zeigt die Dämpferkraft nach rechts oder links? Weil er dämpft ja die Bewegung durch u(t), aber führt trotzdem zu einer Bewegung des vertikalen Stabs!
F = d*a/2*(u'-phi') oder ist es hier nicht u'+phi'?
Wie war das nochmal, wenn ich um das Lager des vertikalen Stabs Momentensumme bilde, wie groß ist das Moment durch die Dämpferkraft?
M_d = d*a/2*(u'-phi') oder phi' -u'
detlef
|
|
|
aVague
Anmeldungsdatum: 04.10.2008
Beiträge: 186
|
| aVague Verfasst am: 27. Dez 2008 13:57 Titel: |
|
|
@schnudl , habe ich mich etwas uber virtuelle Arbeit erinnert, es ist fur ReibungsKrafte "aktuell" (da ReibungsKraft nicht "Potential" ist, aber wollen man  bleiben , additieren wir diese virtuelle ist es besser zu sagen "Potential") . Wo diese W genommen wird bin ich nicht sicher. bleiben , additieren wir diese virtuelle ist es besser zu sagen "Potential") . Wo diese W genommen wird bin ich nicht sicher.
|
|
|
aVague
Anmeldungsdatum: 04.10.2008
Beiträge: 186
|
| aVague Verfasst am: 27. Dez 2008 13:59 Titel: |
|
|
|
aus Kinetishe Energie - ist es logish , aber habe ich auf diese Frage eine andere Meinung
|
|
|
schnudl
Moderator
Anmeldungsdatum: 15.11.2005
Beiträge: 6979
Wohnort: Wien
|
|
|
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
| 01detlef Verfasst am: 27. Dez 2008 18:51 Titel: |
|
|
Hallo,
dann habe ich das verstanden, aber was sind diese Zwangsbedingungen bei solchen Systemen?
detlef
|
|
|
schnudl
Moderator
Anmeldungsdatum: 15.11.2005
Beiträge: 6979
Wohnort: Wien
|
| schnudl Verfasst am: 27. Dez 2008 18:56 Titel: |
|
|
nachzulesen z.B. hier
Durch die spezielle Kinematik deines Systems ergeben sich zwei Variablen, die unabhängig verändert werden können, z.B. der Winkel des Pendels und die linke Position des Dämpfers. Statt letzterem könntets du auch den Winkel des Kurbeltriebs nehmen, die Lagrangegleichung kann mit beiden Variablen formuliert werden. Die gewählten freien Variablen nennt man generalisierte Kooordinaten. Ich denke aber, dass dir das sowieso klar war...
_________________
Wenn du eine weise Antwort verlangst, musst du vernünftig fragen (Goethe) |
|
|
01detlef
Anmeldungsdatum: 01.06.2008
Beiträge: 128
|
| 01detlef Verfasst am: 27. Dez 2008 19:13 Titel: |
|
|
Achso okay, das kenne ich!
Danke
|
|
|
|